ROS基础

ROS基础
chonqinROS
前言
使用的ros版本为Noetic版本,基于Ubuntu20.04.6
ros是什么
- ROS:Robot Operating System
- 包括了四个part:通信机制、开发工具、应用功能、生态系统
- 这种模式旨在提高机器人研发中的软件复用率
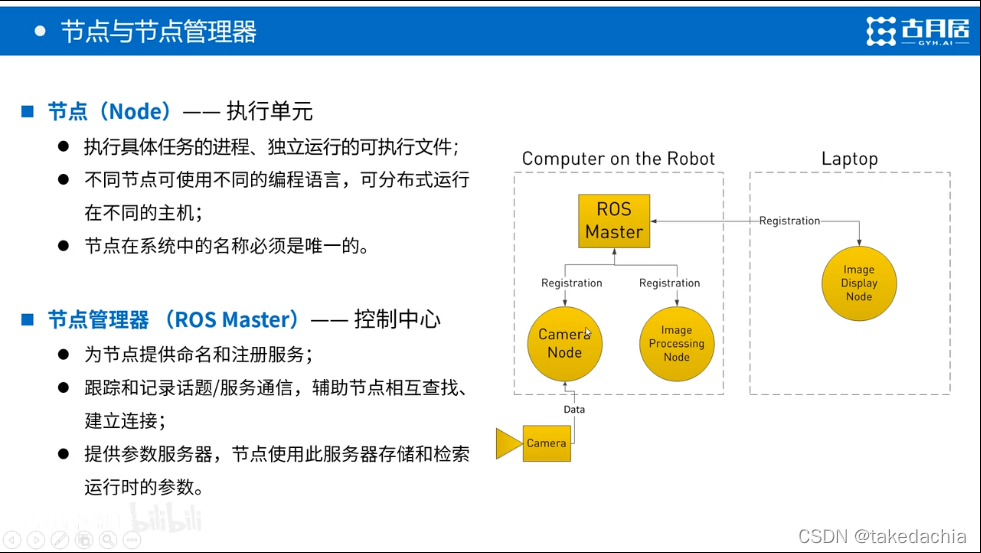
节点(Node) 与 节点管理器(Node Master)
2.通信模式之一——Topic模式
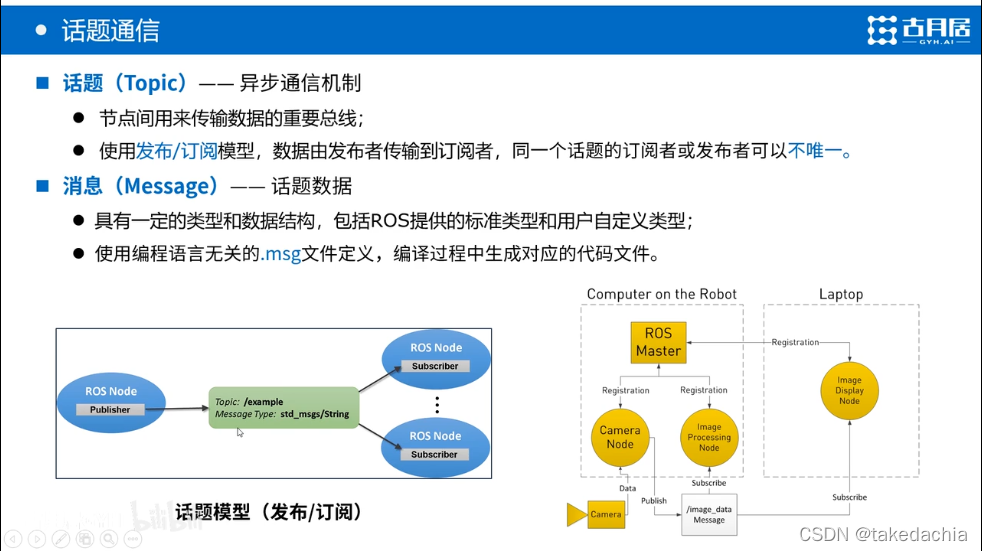
- Message:定义数据的类型,具有一定的数据结构定义
- 单向的,可多次
- 数据的管道称为Topic(话题)
- 使用 发布&订阅 模型,右下图显示了Camera Node是发布者,图像处理节点和图像显示节点是订阅者。
- 话题的消息的接口使用 .msg 文件定义
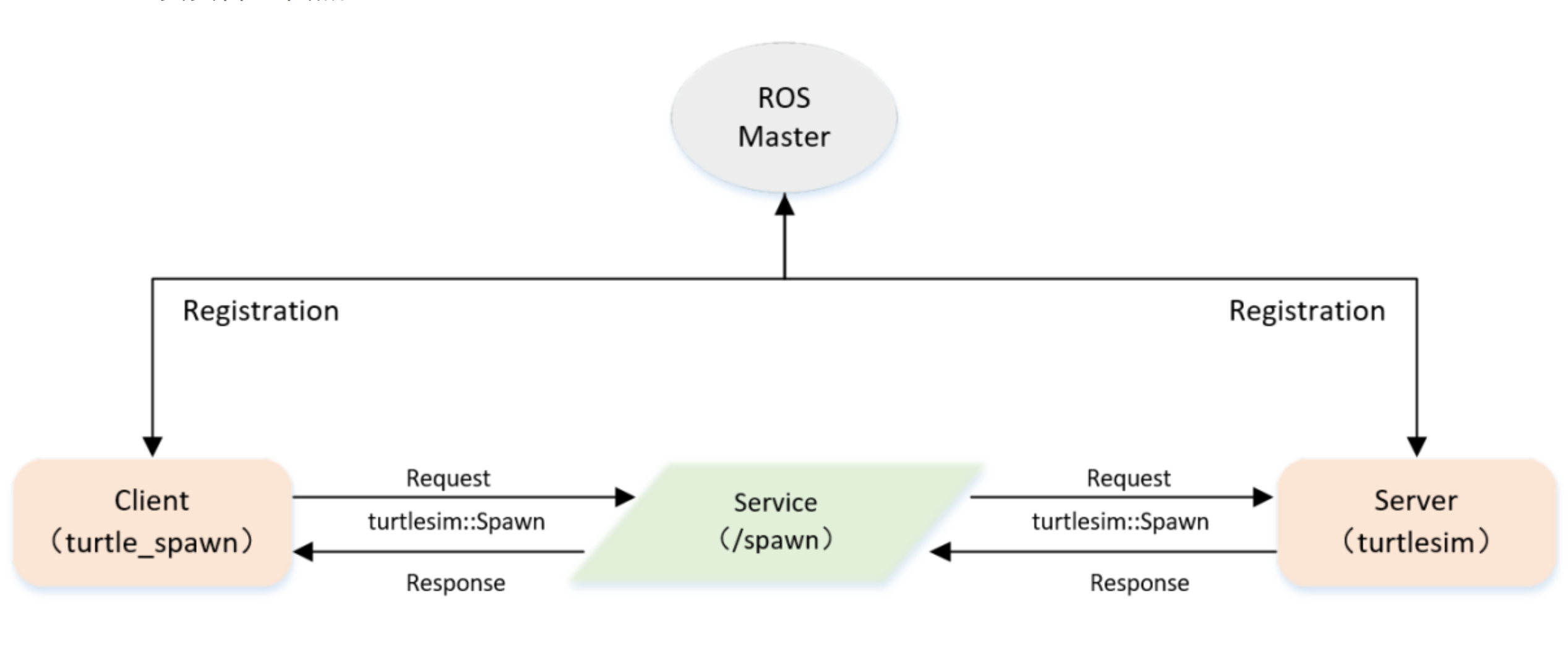
通信模式之二——Service模式
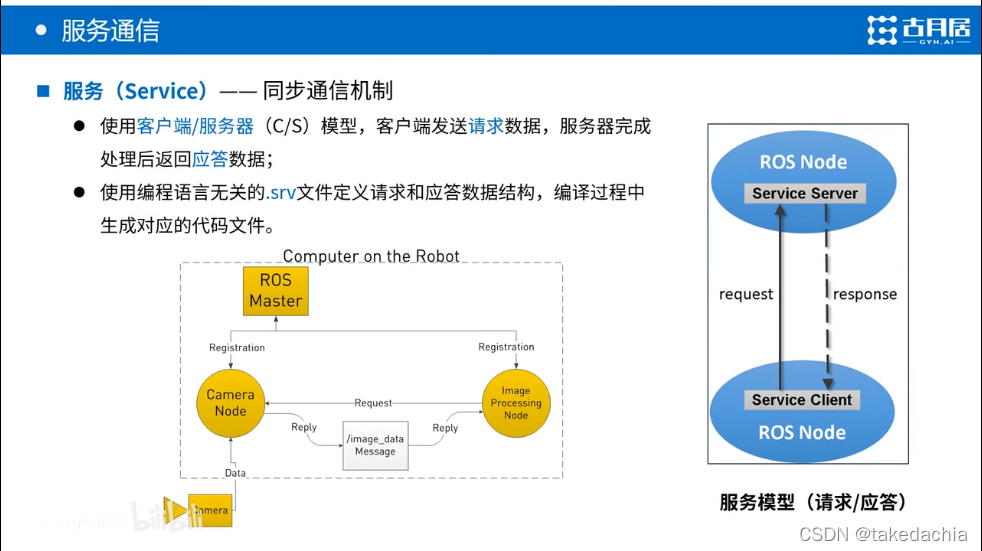
- C/S模型
- 带有反馈的机制
- 双向的,来往一次
- 如左下图,图像处理节点向Camera节点发出请求(比如上调图像分辨率),Camera节点上调分辨率后向图像处理节点发出反馈。
- 服务的数据内容可用 .srv 自定义
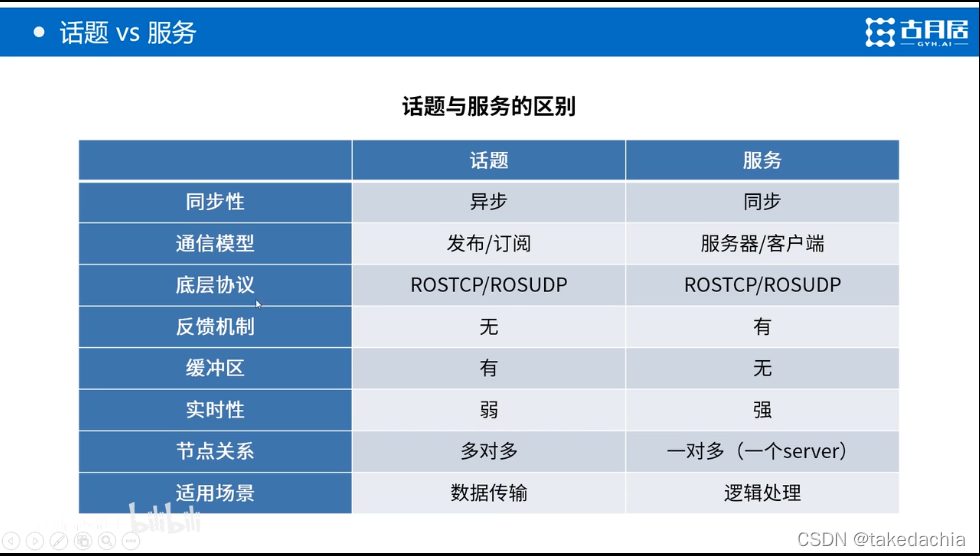
两者对比
参数(Parameter)
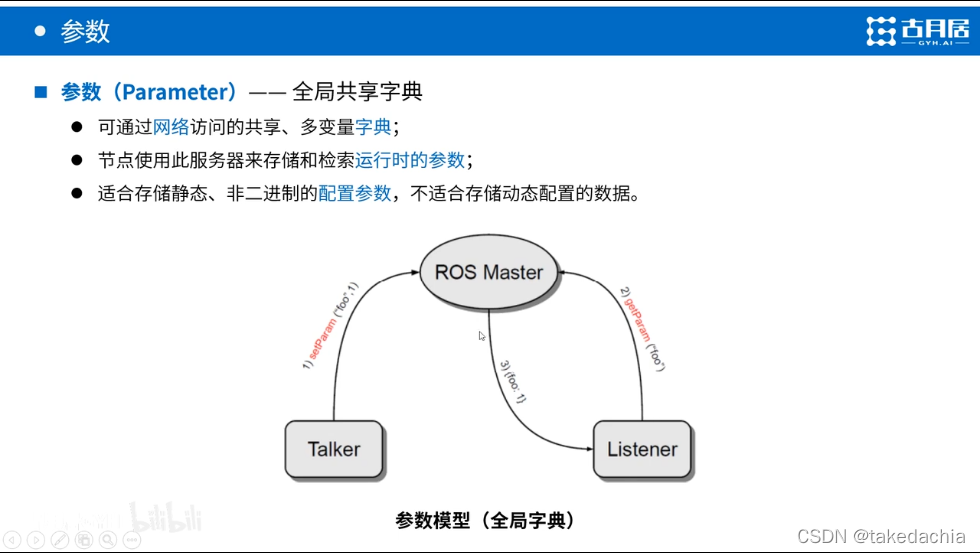
- 参数是一个“字典”
- 存储在ROS Master服务器,节点可以对参数存储、检索、更新(如图)
- 适合静态存储、非二进制
文件系统
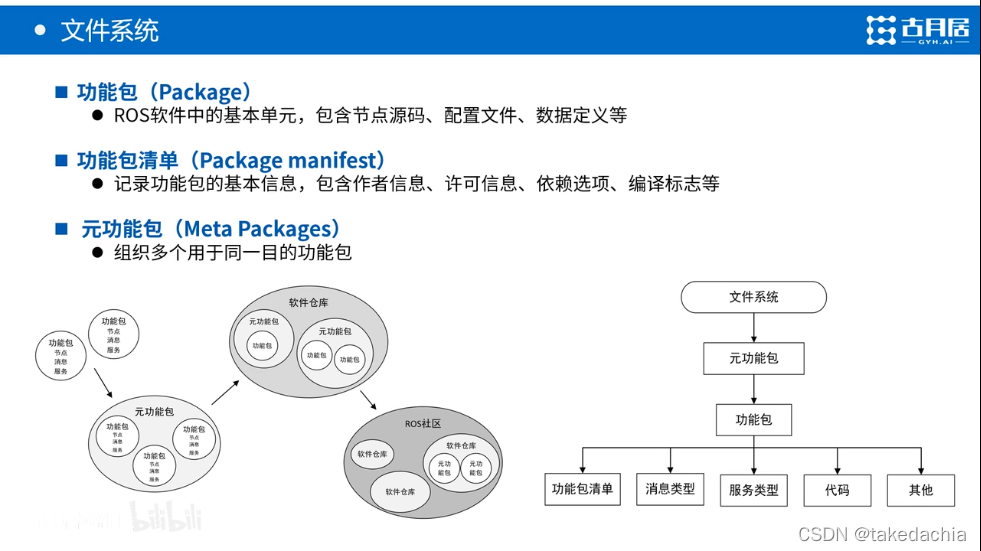
- 文件系统代表了代码的结构
ROS命令行工具
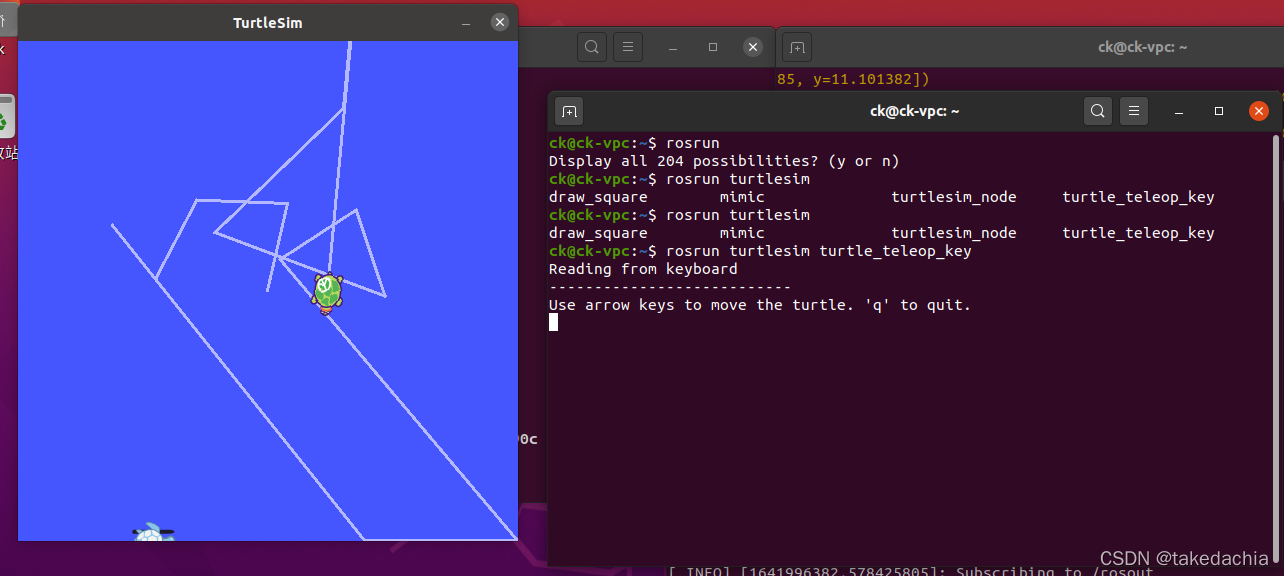
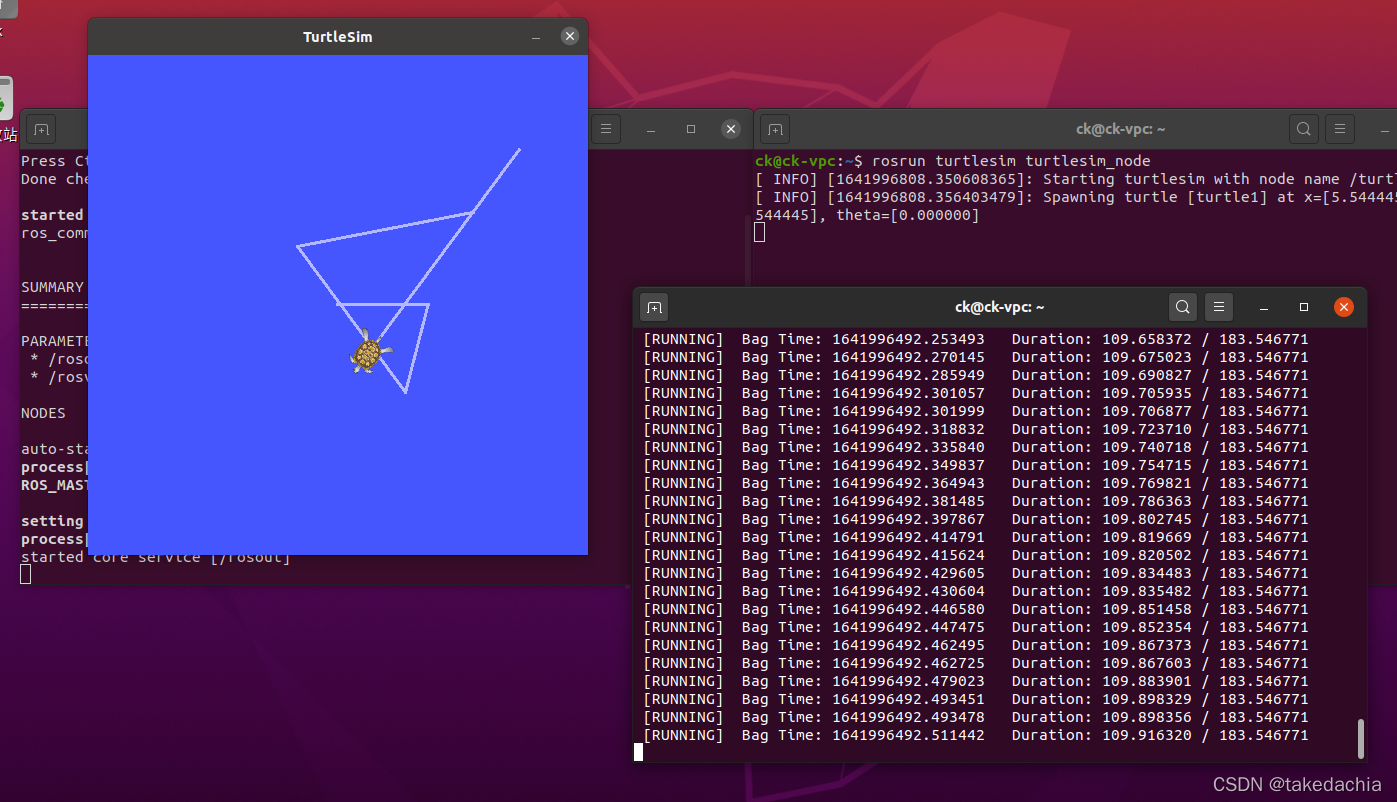
回顾第一个小海龟程序
打开小海龟程序:
终端,启动ROS Master:
1 | roscore |
终端2,启动小海龟仿真器:
(输入rosrun turtlesim,敲两下Tab健可查看该命令下有哪些功能)
1 | rosrun turtlesim turtlesim_node |
终端3,启动海龟控制节点:
1 | rosrun turtlesim turtle_teleop_key |

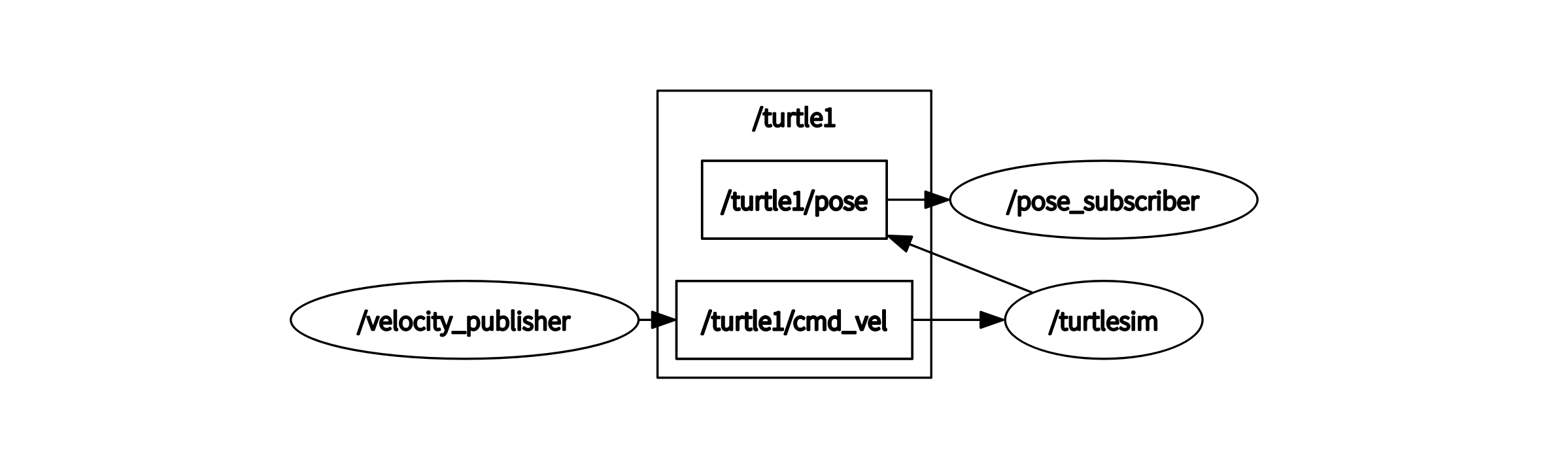
查看系统中的计算图:rqt_graph
新建终端窗口:
1 | rqt_graph |
可展示系统中运行的计算图:
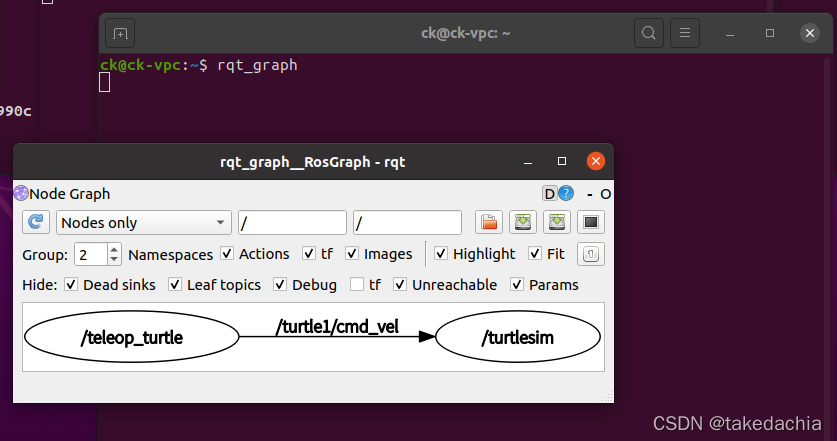 可以清晰地了解系统节点间通信的部分信息。
可以清晰地了解系统节点间通信的部分信息。
teleop_turtle节点(键盘控制节点)通过cmd_vel(topic)向turtlesim节点(海归仿真器节点)发出消息,使得小海龟移动。
rosnode
显示节点列表:rosnode list
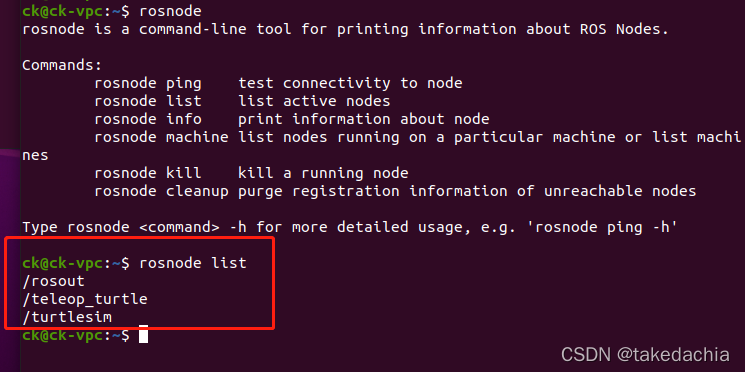 可以看到有3个节点。
可以看到有3个节点。
查看节点信息:rosnode info
查看节点的具体信息:rosnode info /节点名
我们查看海龟仿真器节点/turtlesim的信息:
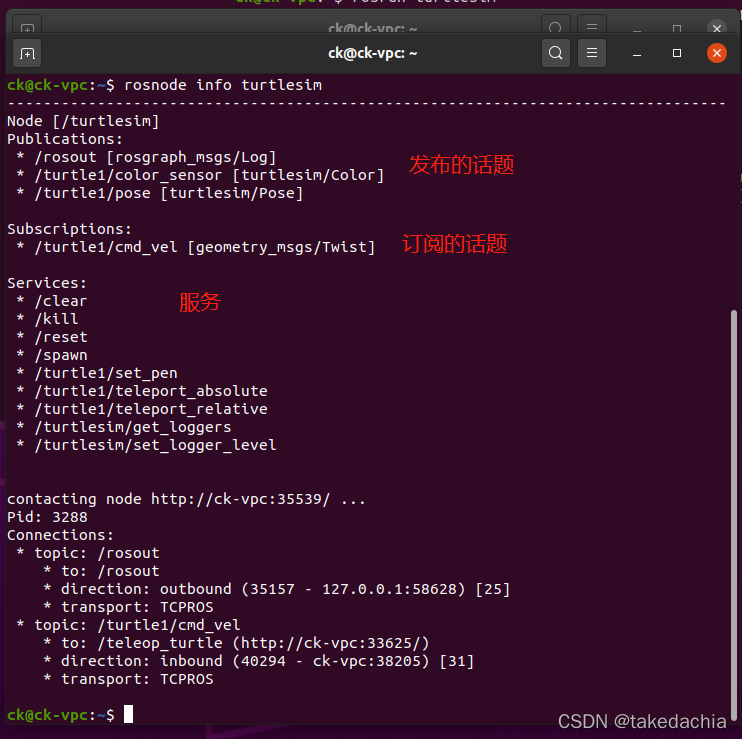
可以看到海龟仿真器节点/turtlesim自己有一些发布和订阅,也有一些服务。
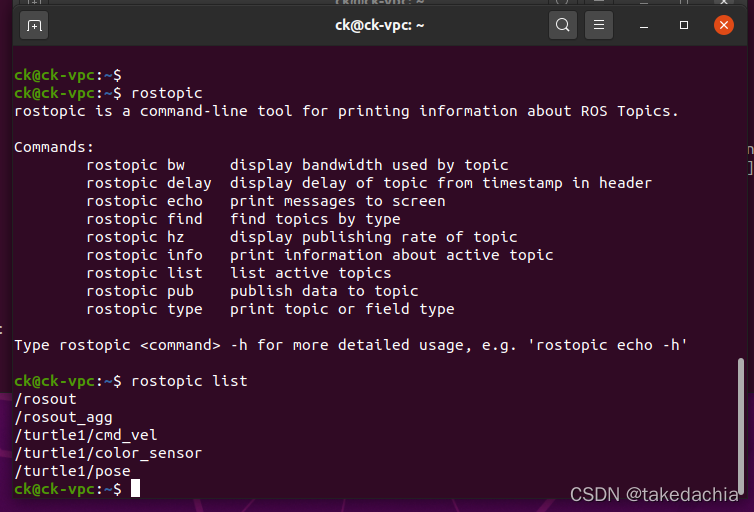
rostopic
显示topic列表:rostopic list
手动发布数据给topic
我们来手动发布数据给topic来控制海龟移动,使用rostopic pub
上图我们看到小海龟是通过/cmd_vel这个topic进行发布信息而移动的,这次我们通过手动publish数据给这个topic来控制小海龟移动。
格式:rostopic pub (参数) 话题名 消息数据结构 “具体数据”
例,我们输入:(我们可以使用Tab键让我们自动填充数据,使用方向键←→移动到指定位置修改数据,比如我们把x的0.0改成了1.0)
1 | rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear: |
小海龟沿着正前方向移动了1单位,我们再使用参数-r 5移动5次,小海龟就撞上了南墙。
Ctrl+C就可以终止。

rosmsg
查看消息数据结构
上例我们使用了消息数据结构定义了一个消息传给topic,我们可以查看有哪些消息数据结构。
查看消息数据结构使用:rosmsg show …
在输入过程中,我们可以勤使用Tab键查看或填充内容。
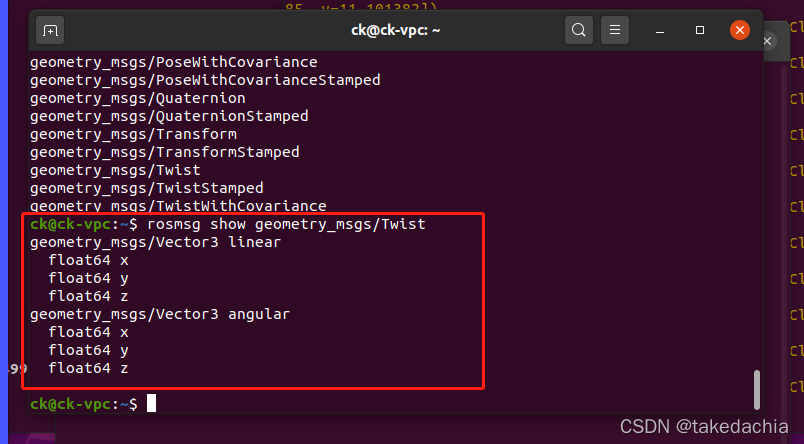 我们可以看到geometry_msgs/Twist数据结构的内容。
我们可以看到geometry_msgs/Twist数据结构的内容。
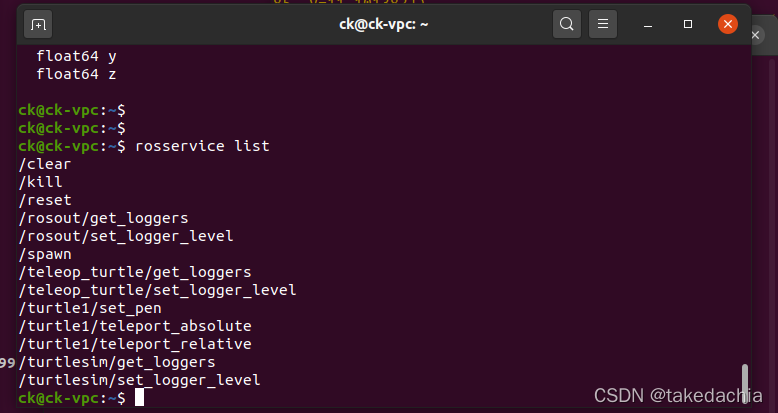
使用服务通信方式:rosservice
上例我们使用了向topic传msg来控制节点,这次我们试试第二种通信方式service。
查看服务列表:rosservice list
手动通过服务来进行操作
这次我们通过人工产生服务(service)来诞生一只新海龟,使用rosservice call /spawn …
在服务列表中,有个/spawn服务,可以产生一只新的海龟。
格式:rosservice call (参数) 服务名 “具体数据”
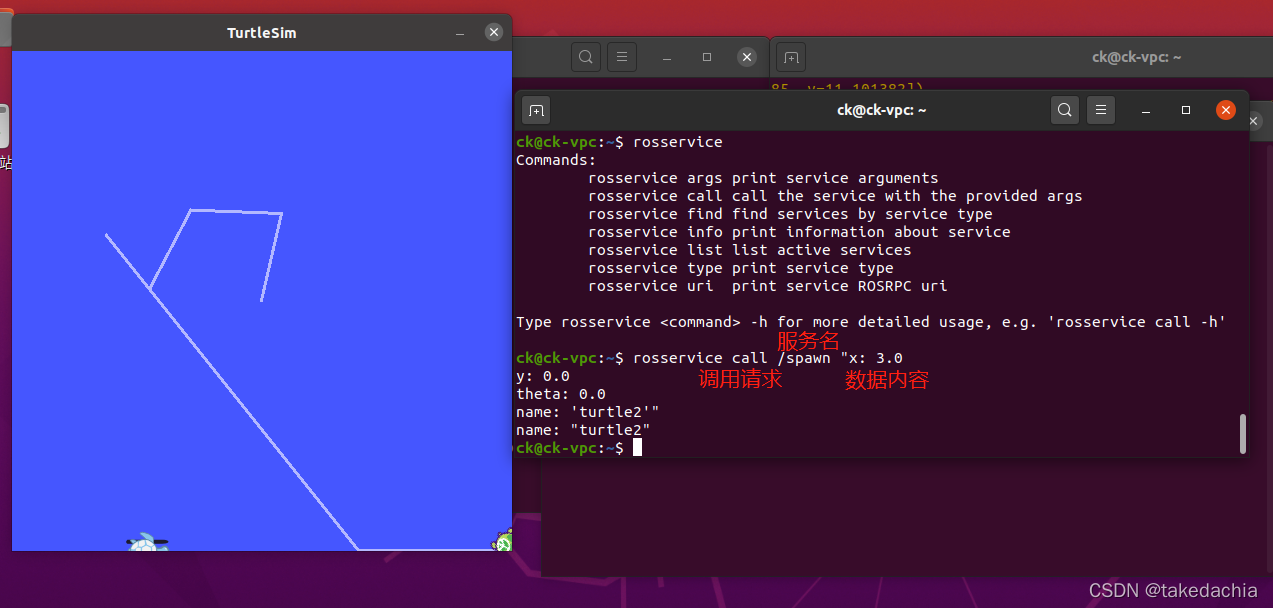
这时我们再输入rostopic list,可以看到turtle2已经在topic里了。
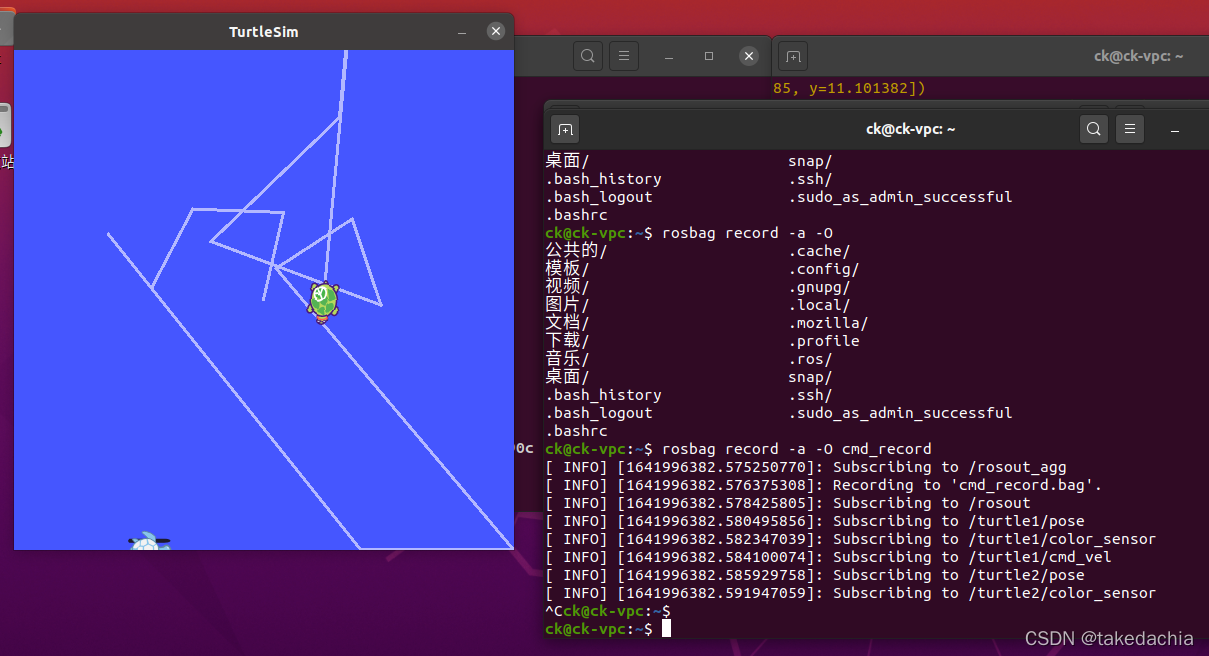
话题记录和复现:rosbag
试想我们尝试让海龟以我们指定的路径移动了一回,我们想要把它 记录下来,拷贝到自己的实验室再复现出来,我们就可以使用话题记录功能。
常用命令:rosbag record -a -O 文件名
比如我们使用之前打开的键盘操作器让海龟移动一圈并记录下来:
(1)打开新终端输入rosbag record -a -O cmd_record
这样就开始记录了:
 (2)移动一下:
(2)移动一下:
 到记录界面按Ctrl+C停止:
到记录界面按Ctrl+C停止:
 文件就记录在了这里:
文件就记录在了这里: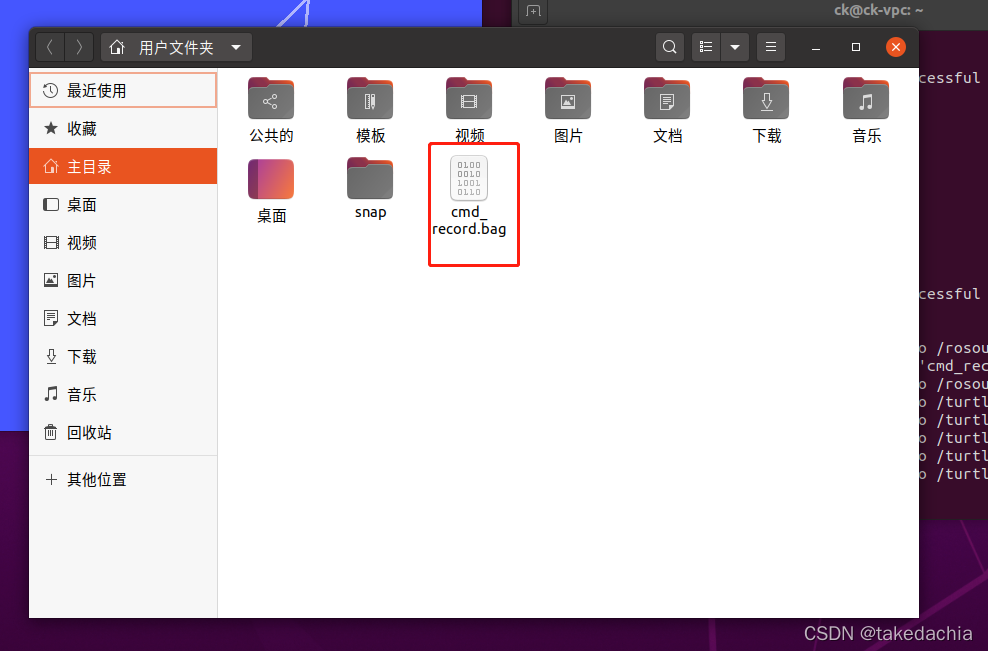
(3)接下去关闭所有打开的ros节点
重新开启roscore,开启海龟节点rosrun turtlesim turtlesim_node
这时我们输入 rosbag play cmd_record就可以复现之前的移动啦!
创建ros工作空间与功能包
1.What is Workspace(工作空间)
工作空间(Workspace):存放工程开发相关文件的文件夹。类似一个IDE(例如Pycharm)新建一个工程,就是一个工作空间。包含4个文件夹:
- src:代码空间(Source Space):放置功能包代码
- build:编译空间(Build Space):编译过程中产生的中间文件,不用过多关注
- devel:开发空间(Development Space):放置编译生成的可执行文件、库、脚本
- install:安装空间(Install Space):存放可执行文件,与上面有一定重复
2 .创建工作空间
创建:
1 | mkdir -p ~/catkin_ws/src |
我们先创建一个src文件夹,然后进入该文件夹
第3行catkin_init_workspace意为将当前文件夹变为工作空间,使其拥有工作空间的属性
注:“~/”意为当前用户名目录;“-p”意为递归创建目录,即直接创建多级目录。
src文件夹即代码空间,不能自行用别的名称代替
 可以看到创建了这么一个txt文件,说明创建工作空间成功。
可以看到创建了这么一个txt文件,说明创建工作空间成功。
编译空代码的工作空间
要编译工作空间,先要回到工作空间的根目录。
1 | cd ~/catkin_ws // |
使用catkin_make为编译指令,将src里的源码进行编译
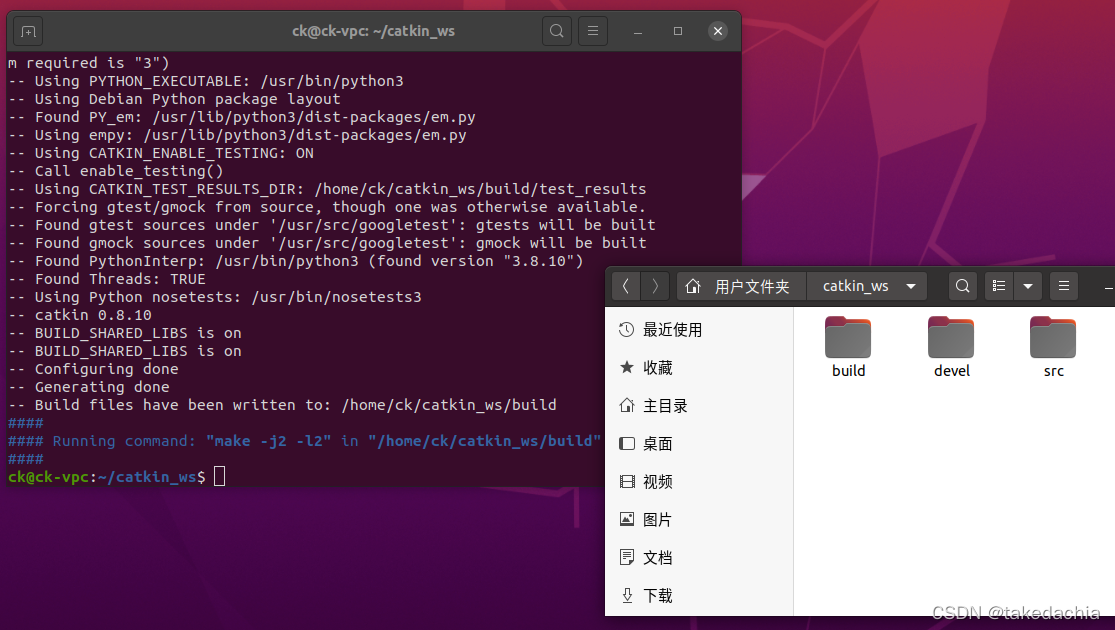
可以看到生成了build和devel两个新文件夹,devel存放了编译完成的内容。
这里没有生成install文件夹,要生成install文件夹,输入catkin_make install:
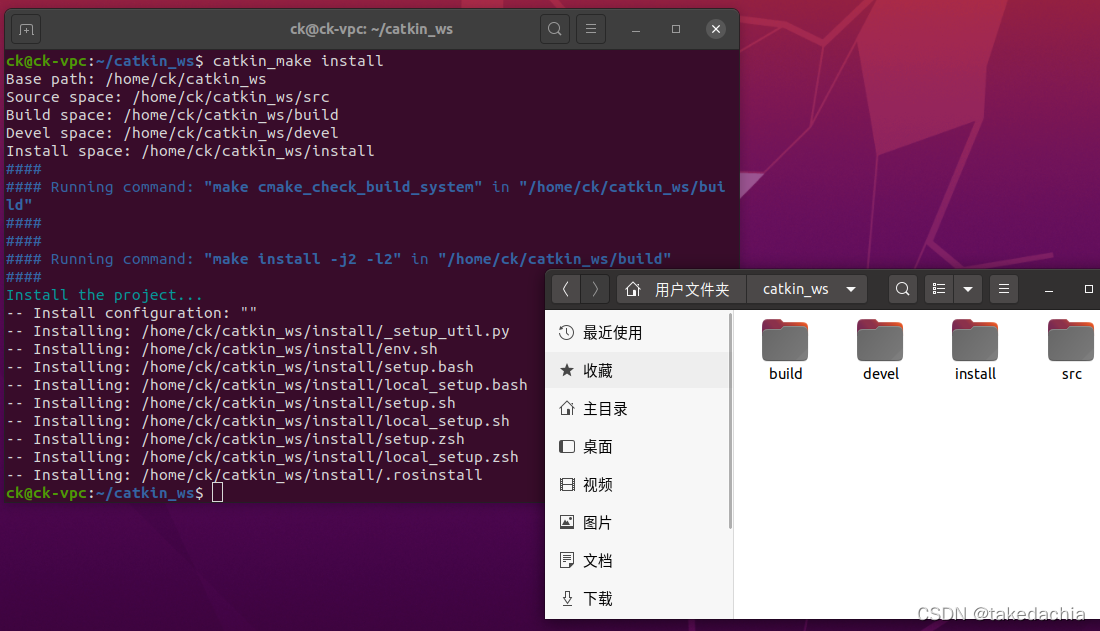
install中生成了可执行文件。
这样一个空的工作空间创建好了,并且空的代码空间(功能包)编译完成。
创建功能包
功能包是放置ROS源码的最小单元。
上面我们创建了一个空的工作空间,src文件夹里面没写东西,现在我们创建一个自己的功能包。
注意同一工作空间下,不允许存在同名功能包;不同工作空间下,允许存在同名功能包。
指令格式:catkin_create_pkg
[depend]为依赖,即指明编译的时候需要ROS中的其他功能包,如需要调用python、C++库,就要指明rospy、roscpp
1 | cd ~/catkin_ws/src |
创建后记得编译一下。
设置并检查环境变量
编译完功能包后,为了运行,先设置环境变量,以便系统找到我们的工作空间和功能包。
1 | source ~/catkin_ws/devel/setup.bash |
检查:
1 | echo $ROS_PACKAGE_PATH |
发布者Publisher的编程实现
编程publisher 发送 message 产生topic,让海龟(sub)订阅实现功能。
进入src,创建功能包。
1 | catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim |
如何实现一个发布者程序:
- 初始化ROS节点
- 向ROS Master 注册节点信息,包括话题名和话题数据类型
- 创建消息数据
- 按照一定频率循环发布消息
具体操作如下:
先在src目录下创建源文件(c++/Python)
编写程序,修改cmakelist文件,回到工作空间编译并source
终端运行roscore,再打开一个终端运行rosrun +功能包下的程序
最终能看到小海龟按设定的程序运动
具体程序如下:
1 |
|
订阅者Sub的实现
- 初始化ROS节点
- 订阅需要的话题
- 循环等待话题消息,接收到消息后进入回调函数
- 在回调函数中完成消息处理
操作和上面pub一样
程序如下
1 |
|
此程序可以读取小海龟的位置
将pub和sub结合起来后的效果就是,海龟沿着设定的运动,然后sub获取他的位置
使用rqt-graph进行查看
话题消息的定义和使用
Message 是一种自定义的数据结构,用于话题间的数据存储和传输
之前两节使用了Topic模型,我们先使用了Twist类型(geometry_msgs.msg库下的Twist类)的Message作为输入指令进行发布,接着使用了Pose类型(Turtlesim.msg库下的Pose类)的Message作为订阅消息进行接收。
使用rosmsg show命令查看

以上的Message消息都是预定义好的,当我们需要自定义消息该怎么做呢?

如何操作:
创建msg文件
进入功能包目录里,新建msg文件夹,将所有自定义msg文件放入里面
使用touch命令新建一个msg文件,将定义的东西放入msg中
1
touch Person.msg//P要大写
在package.xml添加功能包依赖
将以下两行粘贴进入文件内
1 | <build_depend>message_generation</build_depend> |
在cmakelist中也要更改编译选项,把自定义msg文件添加到编译环境中
1
2
3
4
5
6find_package( ...... message_generation)
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
catkin_package( ...... message_runtime)说明如下:
因为在package.xml添加了功能包编译依赖,在CMakeList.txt里的find_package中也要加上对应的部分;
需要将定义的Person.msg作为消息接口,针对它做编译;
需要指明编译这个消息接口需要哪些ROS已有的包;有了34这两个配置才可将定义的msg编译成不同的程序文件
因为在package.xml添加了功能包执行依赖,在CMakeList.txt里的catkin_package中也要加上对应的部分
最后回到工作空间进行编译
Servce模式的编程与使用
Sever端是海龟仿真器节点,Client端是等待实现的节点,产生Request的请求,发送给Sever端。Sever端接受请求后产生一只海龟,并返回Response。中间传输的数据结构为定义好的turtlesim::Spawn。
老样子,创建一个learing_servce的pkg,添加必要的依赖
新建一个c++文件,放入src目录下
更改cmakelist文件的编译选项,编译文件
开启roscore,进行rosrun,实现功能
程序如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
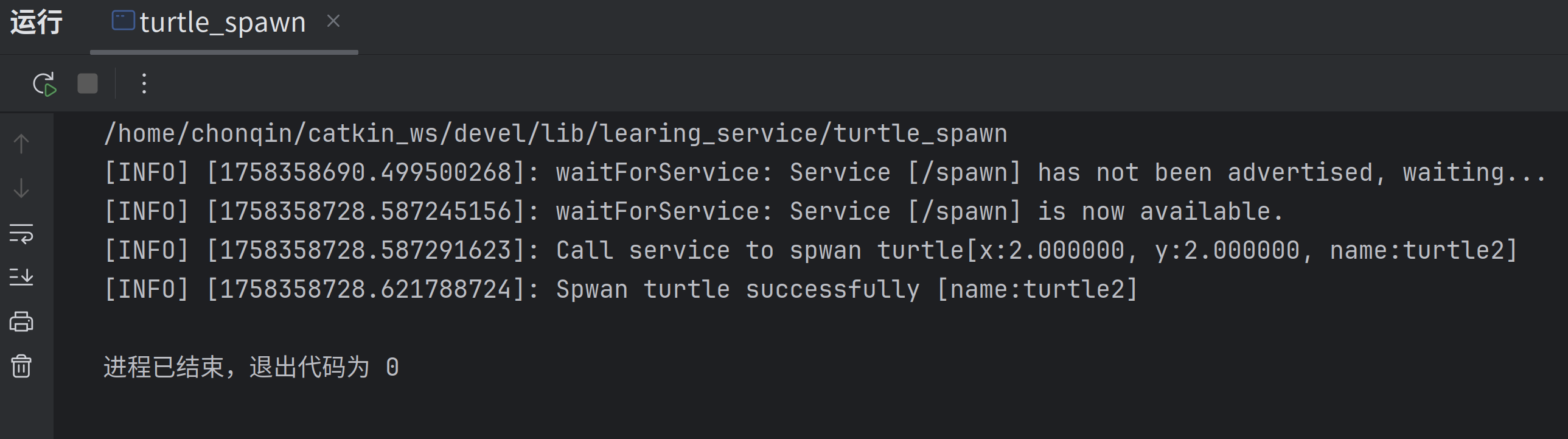
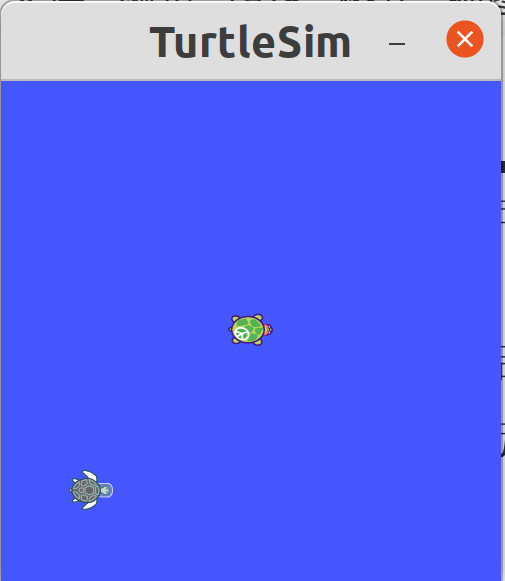
启动turle_spawn后,可以看到先是等待service应答
随后开启turtlrsim节点后,服务应答,就在对应位置添加了一个新的小海龟
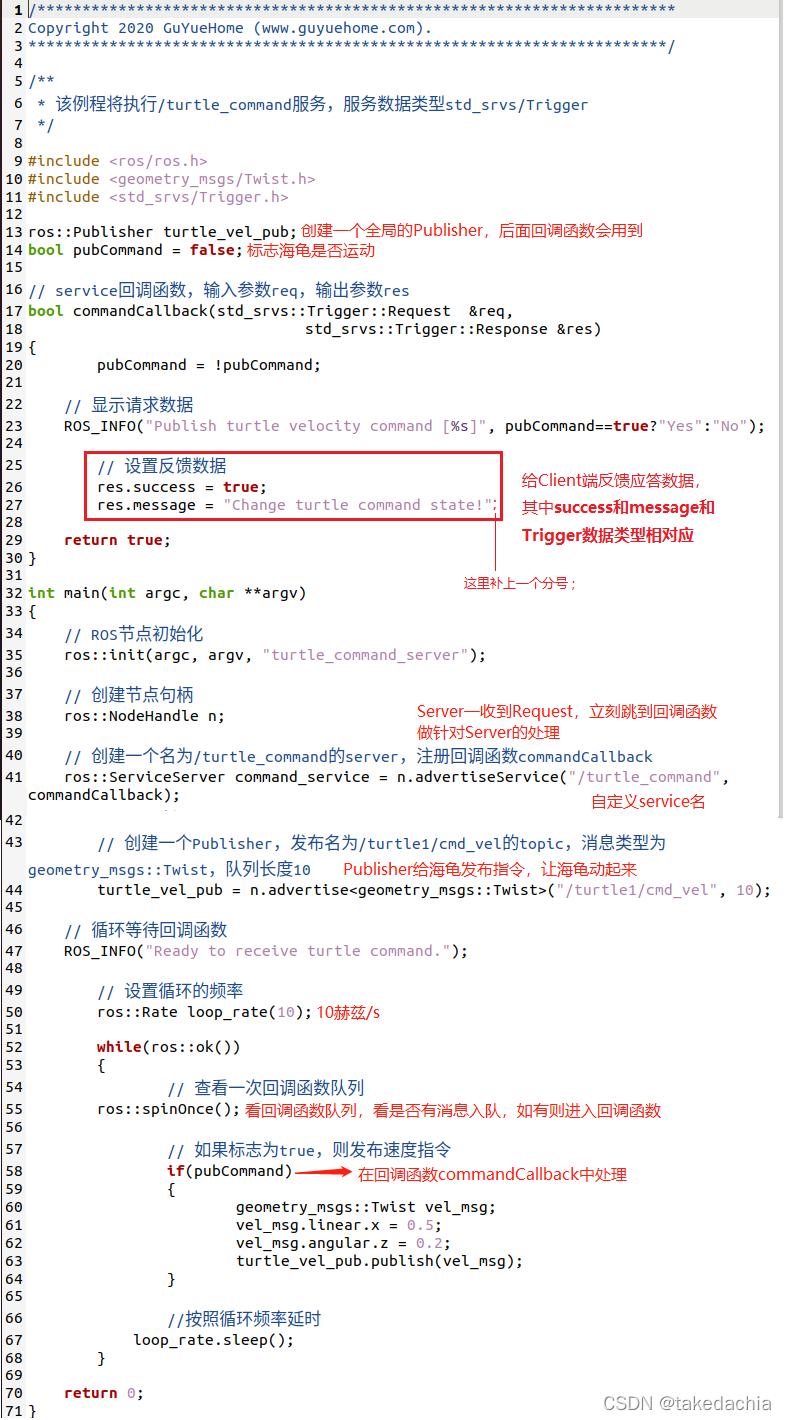
服务端Sever的编程实现
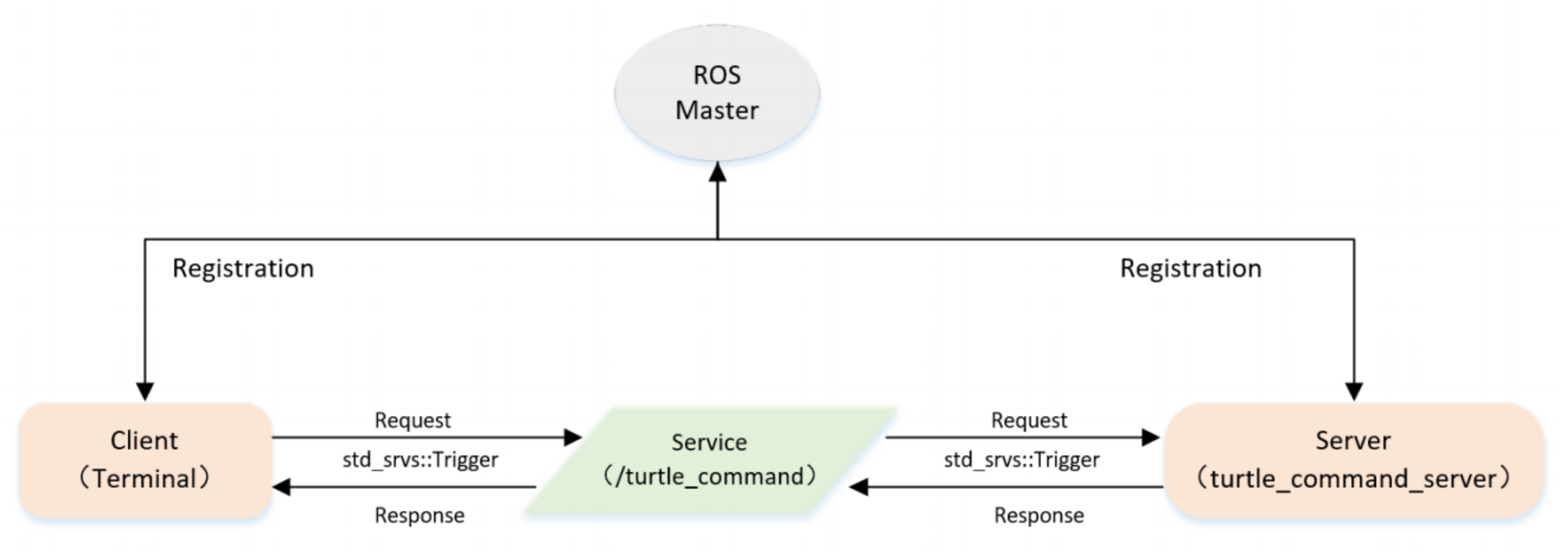
Server端本身是进行模拟海龟运动的命令端,它的实现是通过给海龟发送速度(Twist)的指令,来控制海龟运动(本身通过Topic实现)。
Client端相当于海龟运动的开关,其发布Request来控制Server端。
通过自定义名为 /turtle_command 的Service实现,中间传输消息的数据类型为std_srvs::Trigger(一种针对服务标准std_srvs下的数据定义)来通信。Trigger意为触发,通过Trigger信号来触发Server端的运动指令。
Server端接收这个Trigger信号后,可控制其是否要给海龟发送Twist指令,同时给Client发送Response反馈告诉它海龟的运动状态
开启rosmaster,turtlesim之后
接着我们使用rosservice call ...请求海龟动起来,再打开一个终端。
(输入完 /turtle_command 后敲个空格再用Tab键可自动填充空指令内容)
1 | rosservice call /turtle_command "{}" |
就可以看到海龟动起来了
服务数据srv的使用
在第8节我们讲解了话题消息msg的定义与使用,在第8节的例子中我们曾自定义了一个消息类型“Person”以发布个人信息,Publisher发布个人信息,Subscriber接收个人信息。
这个例子中,Publisher会不断地发信息,Subscriber不停地接数据,一开动就停不下来了,也是topic模式的缺陷。
本节我们使用Service模式用自定义的服务数据srv来实现,我们希望Request一次才发一次信息来显示。
创建srv文件
在pkg功能包目录下创建srv文件夹,并使用touch命令生成.srv文件
在文件中写入数据结构的内容
1 | string name |
添加功能包依赖
由于此srv是自定义的,最初创建的时候没有添加依赖,所以要手动修改package.xml文件添加依赖。找到文件,把下面复制进去就好了。
1 | <build_depend>message_generation</build_depend> |
添加编译选项
打开CMakeLists.txt,添加编译选项,才能顺利的把srv文件编译出来。
大致上为四条,找到对应的部分进行更改即可。
每一部分都有注释在上方进行介绍。
1 | find_package( ...... message_generation) |
还得把自己写的cpp文件添加进去编译
1 | add_executable(person_server src/person_server.cpp) |
第三项是添加依赖项,因为代码涉及到动态生成,我们需要将可执行文件与动态生成的程序产生依赖关系。
注:这里添加的依赖项用到的是gencpp包,是一个C++用的ROS message 和 service 生成器,以依赖动态生成的cpp文件。
最后,编译并运行
运行rosmaster,及其功能包,不再重复。
可以看到运行Server后,启动Client会发一次人物信息,在Server端看到,看到后反馈给Client确认后终止这次发送行为。
先运行Client的话则会一直等待Server端接收,直到Server端启动接收到信息
参数的使用与编程
至此我们学习了ROS中的两种核心通信机制:Topic(话题)模式 和 Service(服务)模式。
Topic中的Publisher、Subscriber,Service中的Client、Server,消息类型msg、srv以及它们的自定义数据类型。
这次讲讲参数的使用
简介
在ROS Master中,存在一个参数服务器(Parameter Server),它是一个全局字典,即一个全局变量的存储空间,用来保存各个节点的配置参数。各个节点都可以对参数进行全局访问。
创建pkg
1 | cd ~/Ros_WorkSpace/src |
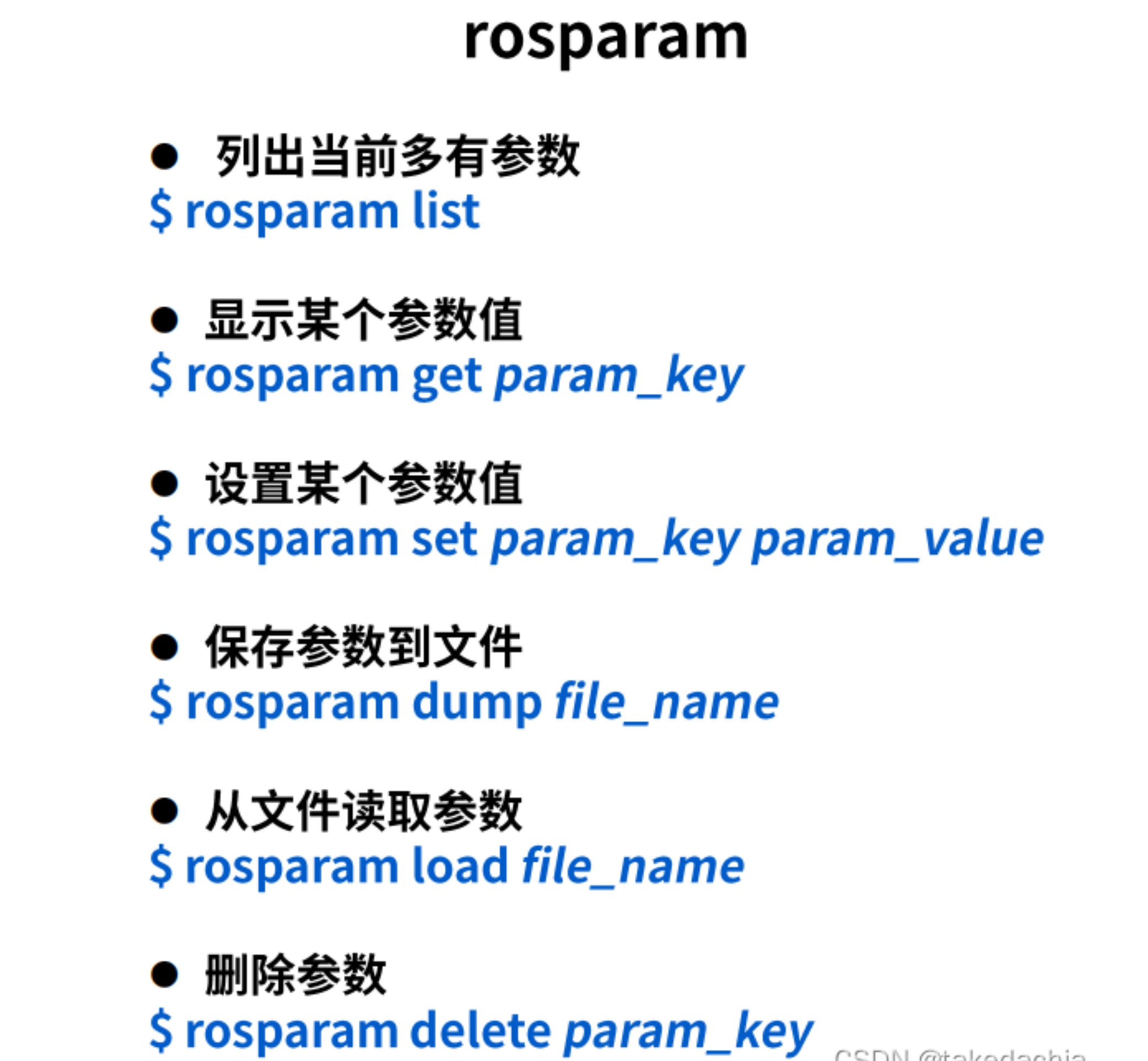
rosparam使用
在ROS中,参数文件常以YAML文件的格式保存
打开海龟节点后使用list命令看一下:
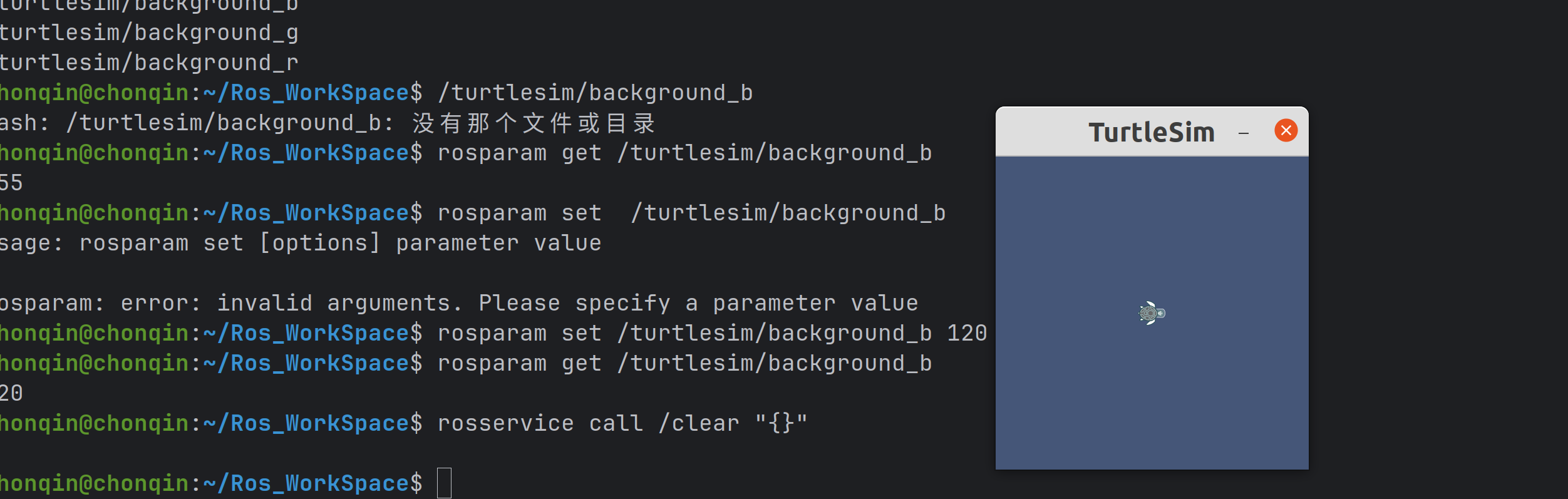
可以使用get命令获取某个参数值
eg:
1 | rosparam get /turtlesim/background_b |

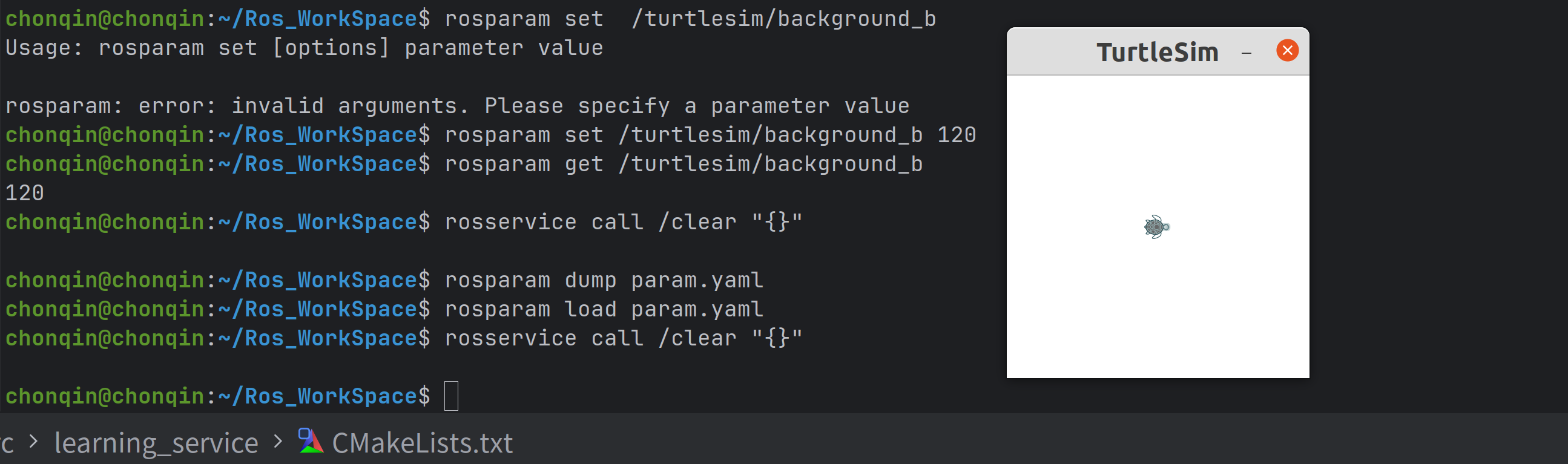
也可以更改这些参数,使用set命令,随后使用get查看到已经更改。

但是,实际海龟背景尚未改变,发送一个clear的空内容服务请求。
这样子命令行更改有点麻烦,可以导出参数文件,更改后再load回去。
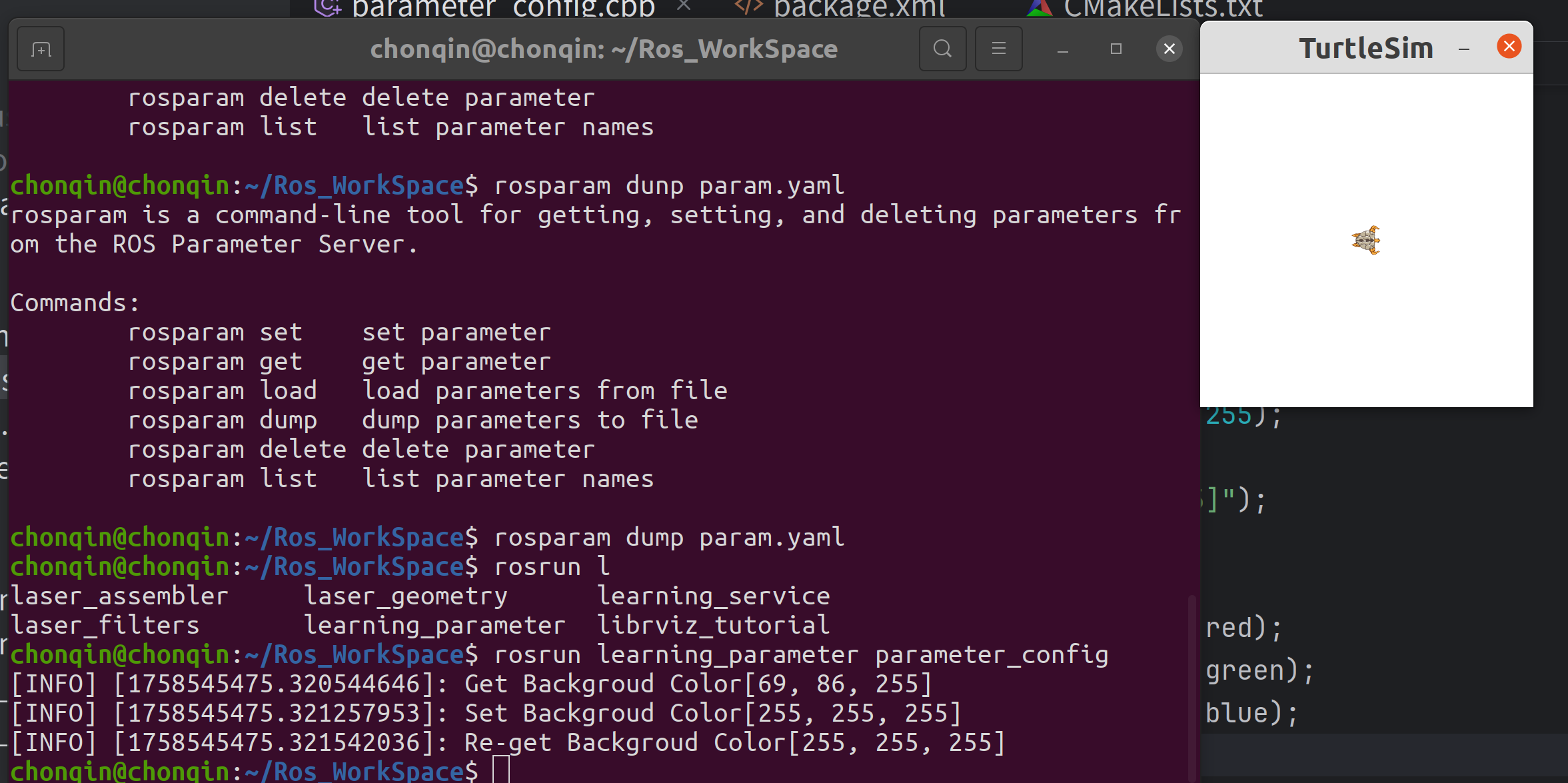
1 | rosparam dump param.yaml |
打开后,更改参数然后保存。
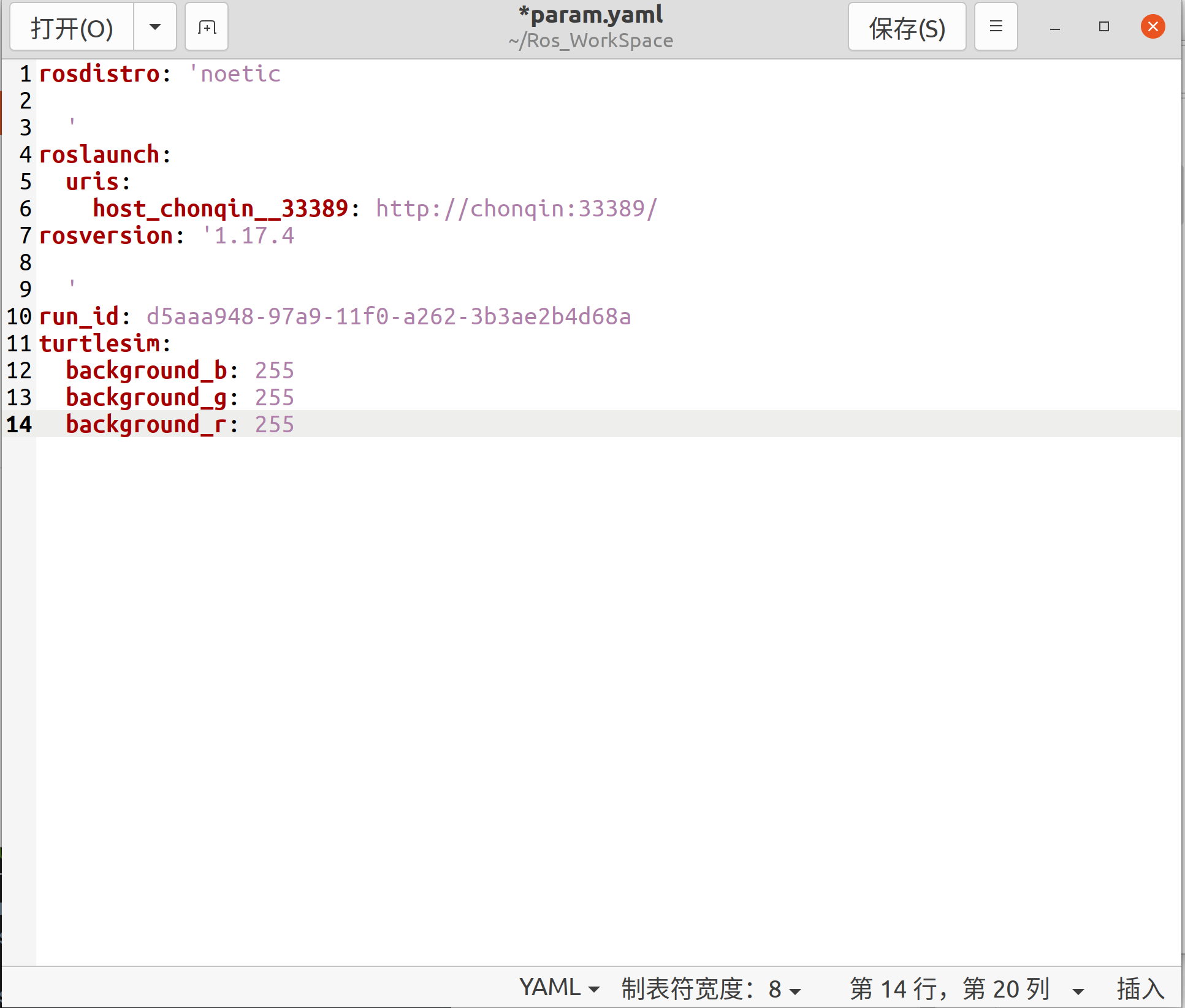
1 | rosparam load param.yaml |
随后,导入参数,再clear一下,可以看到颜色更改了。
其他的命令自己可以尝试。
利用程序来使用参数
程序如下
1 | int main(int argc, char **argv) |
添加cmake编译选项,不再重复。
运行后,更改了。
launch文件的使用
上文中,启动一个ros节点需要使用rosrun命令,每次启动都有打开一个新的终端,十分麻烦。
通过编写launch文件,将多个节点的内容写入进去,就可以一次性开启多个节点。
- launch文件可以放在任意一个软件包的目录下
- 启动launch文件时自动运行roscore,启动rosmaseter。
- 必须按照launch文件内容的格式进行编写,/为结尾。
1 | <launch> |
在launch文件中,为一个节点添加 **launch-prefix=”gnome-terminal-e”**属性,可以让节点单独运行在一个独立终端中。
1 | <node pkg="learning_service" type="turtle_spawn" name="turtle_spawn" launch-prefix="gnome-terminal-e"/> |
Ros机器人运动控制
在上面的基本实验中,我们掌握了基本的话题消息订阅发布、客户端服务端服务发送。
现在,可以添加机器人仿真环境,利用ros来实验控制机器人运行了。
安装机器人仿真环境
打开src目录,下载仿真环境pkg
1 | git clone https://github.com/6-robot/wpr_simulation.git |
运行包内的安装程序
1 | cd Ros_WorkSpace/wpr_simulation/scrips |
安装完成后,回到workspace编译(source和编译再后文中默认进行)
1 | roslaunch wpr_simulation wpb_simple.launch |
可以看到一个仿真界面
创建pkg,编写程序实现基本的运动控制
创建vel_pkg并添加roscpp rospy geometry_msgs依赖
添加vel_node函数,内容如下:
1 | int main(int argc, char **argv) { |
在cmakelist中找到这两个选项,复制并取消注释,里面名字更改成自己的c++文件名
经典操作了,以后不再赘述
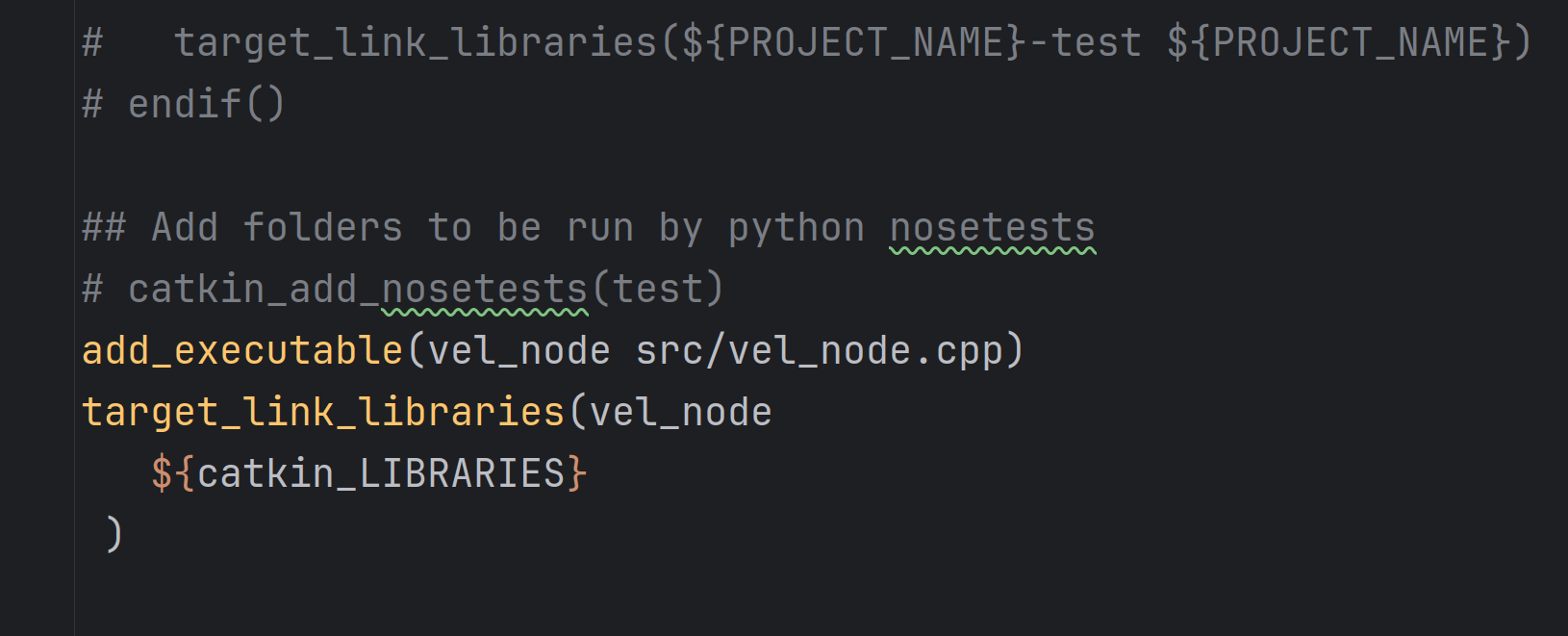
编译运行后,就可以看到仿真里面的机器人按照你的程序进行运动了。
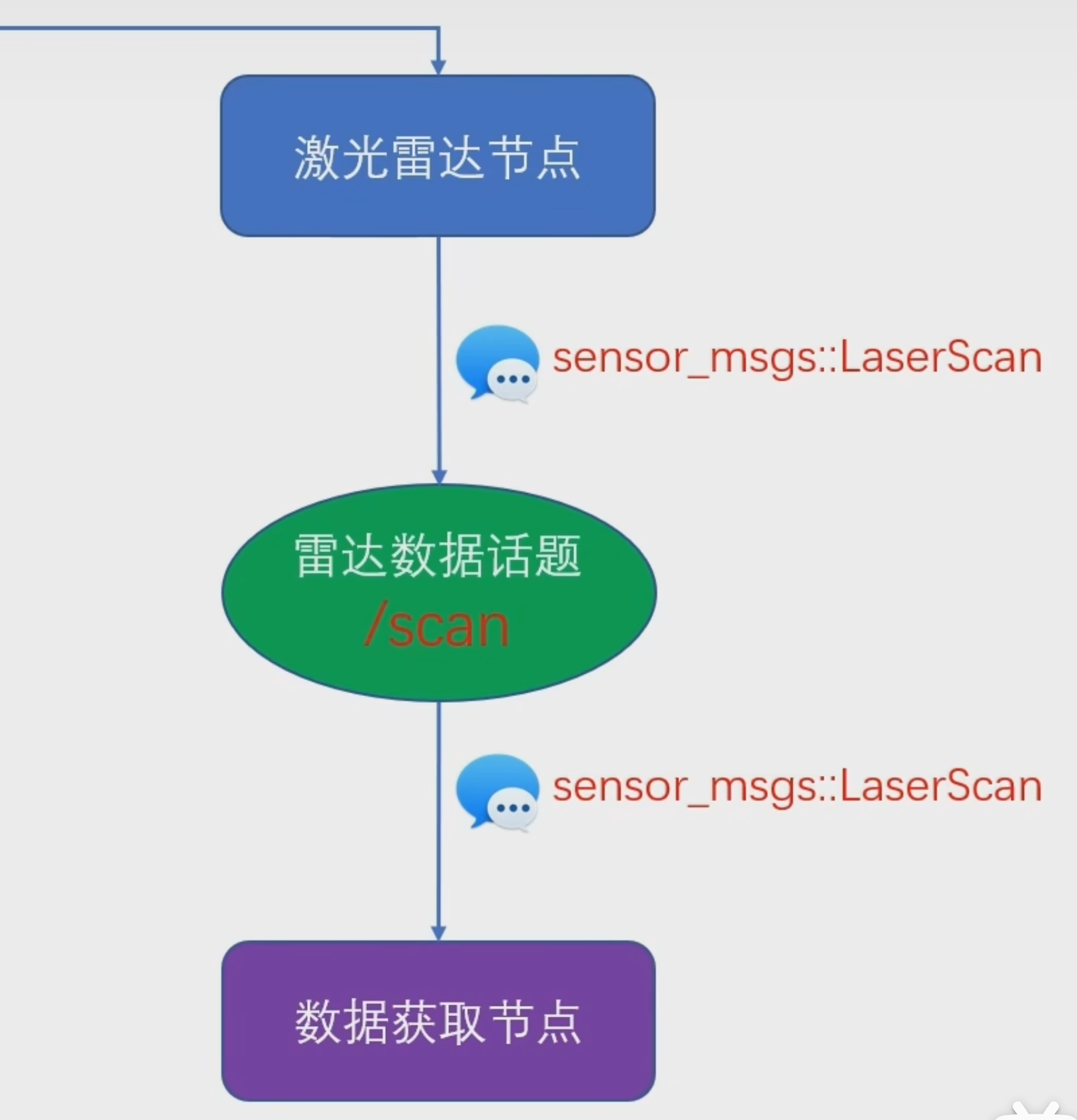
激光雷达
TOF激光雷达
雷达分为激光发射和接受两个模块,通过激光的发射与接收能测定障碍物的距离,再不断旋转雷达,就能测定周围的环境。
只要激光发射接收频率足够快,旋转速度足够快,就能实时得到周围环境。
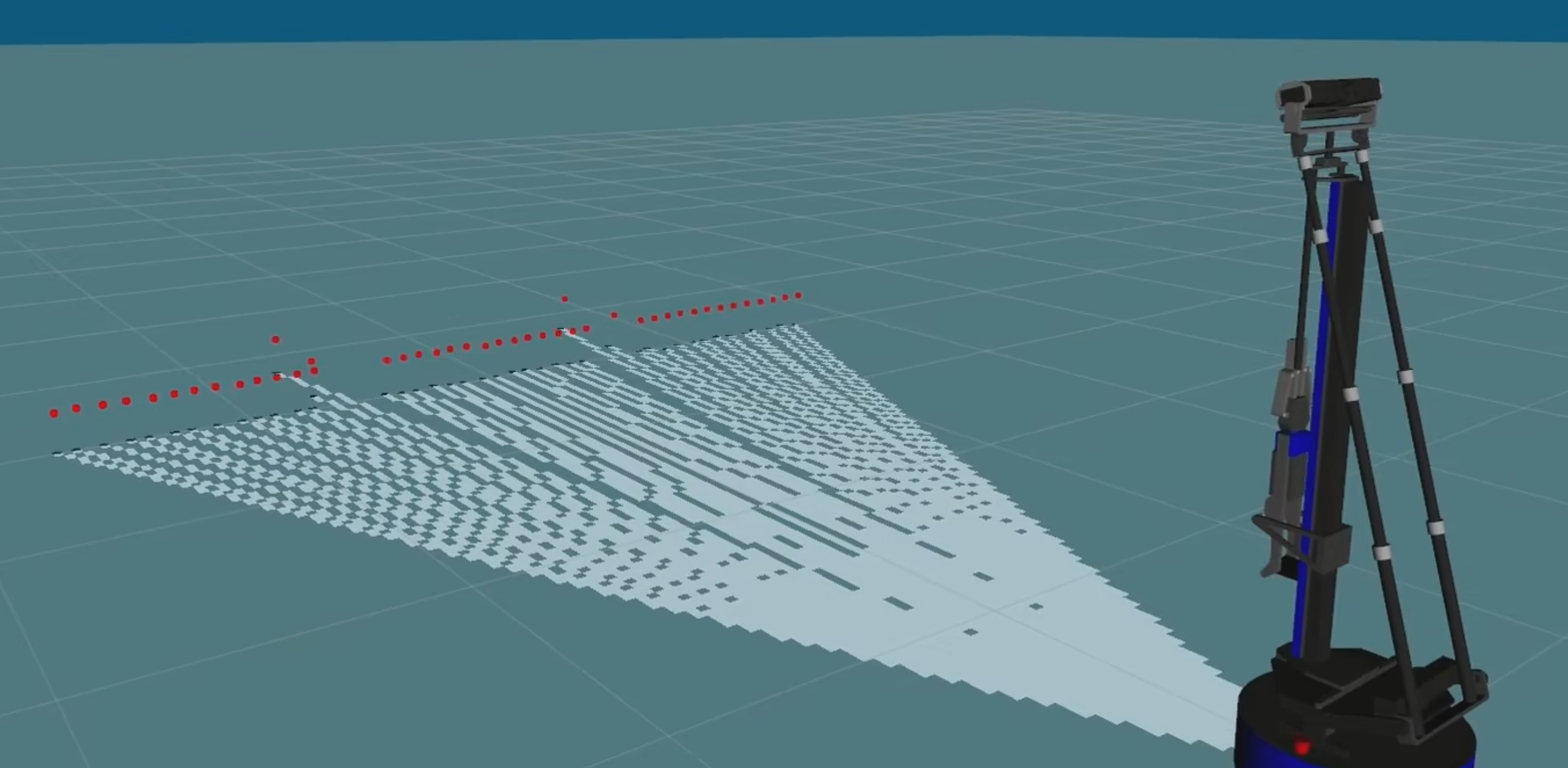
而在ros中Rviz,我们得到的是一个激光雷达的点阵图。
Rviz
全名叫做Robot Visualization Tool ,是一个可视化工具。可以可视化传感器的数据,机器人运算处理的中间结果,比如显示路径规划,目标框选。
操作:
启动仿真程序后,在终端中输入rviz。
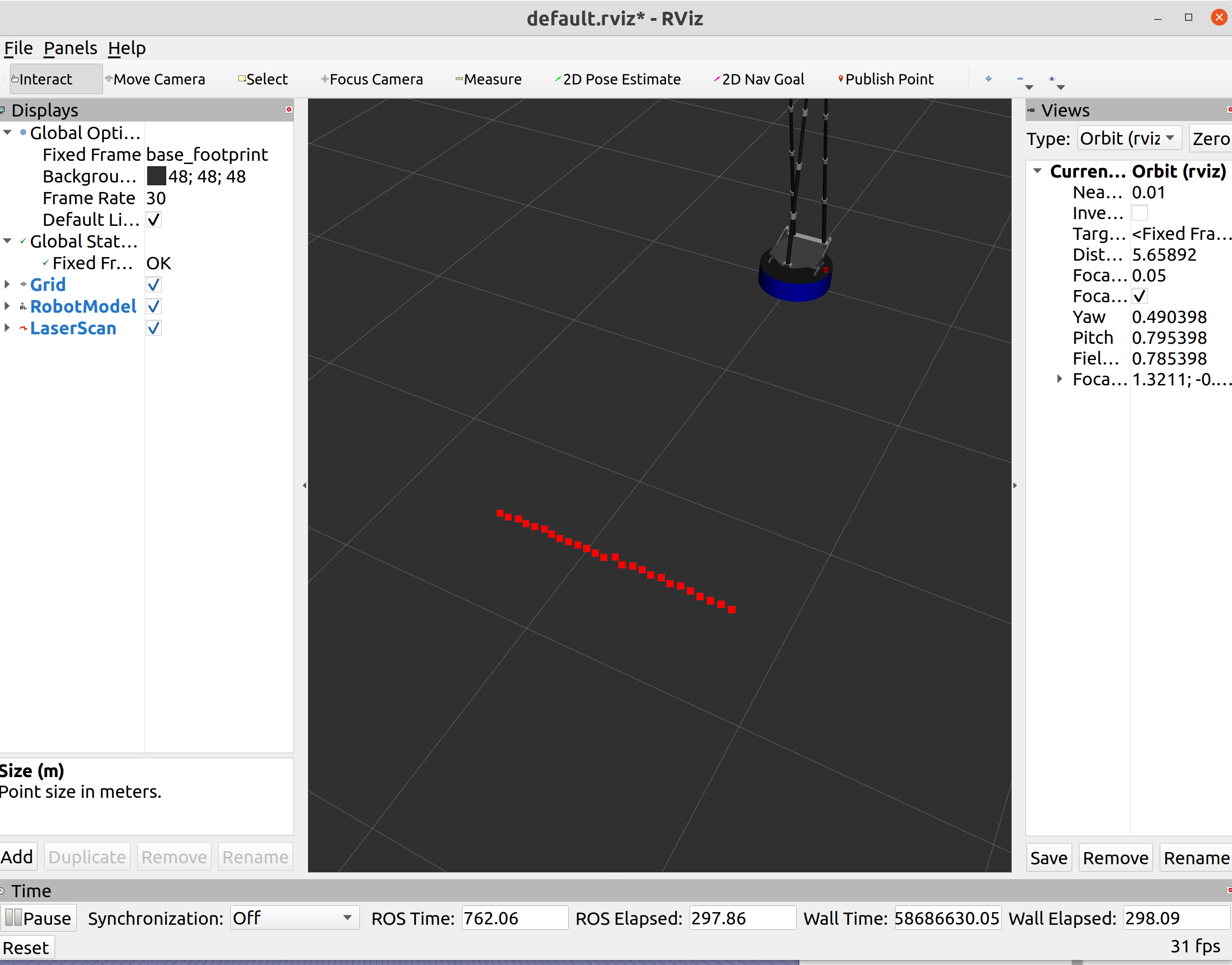
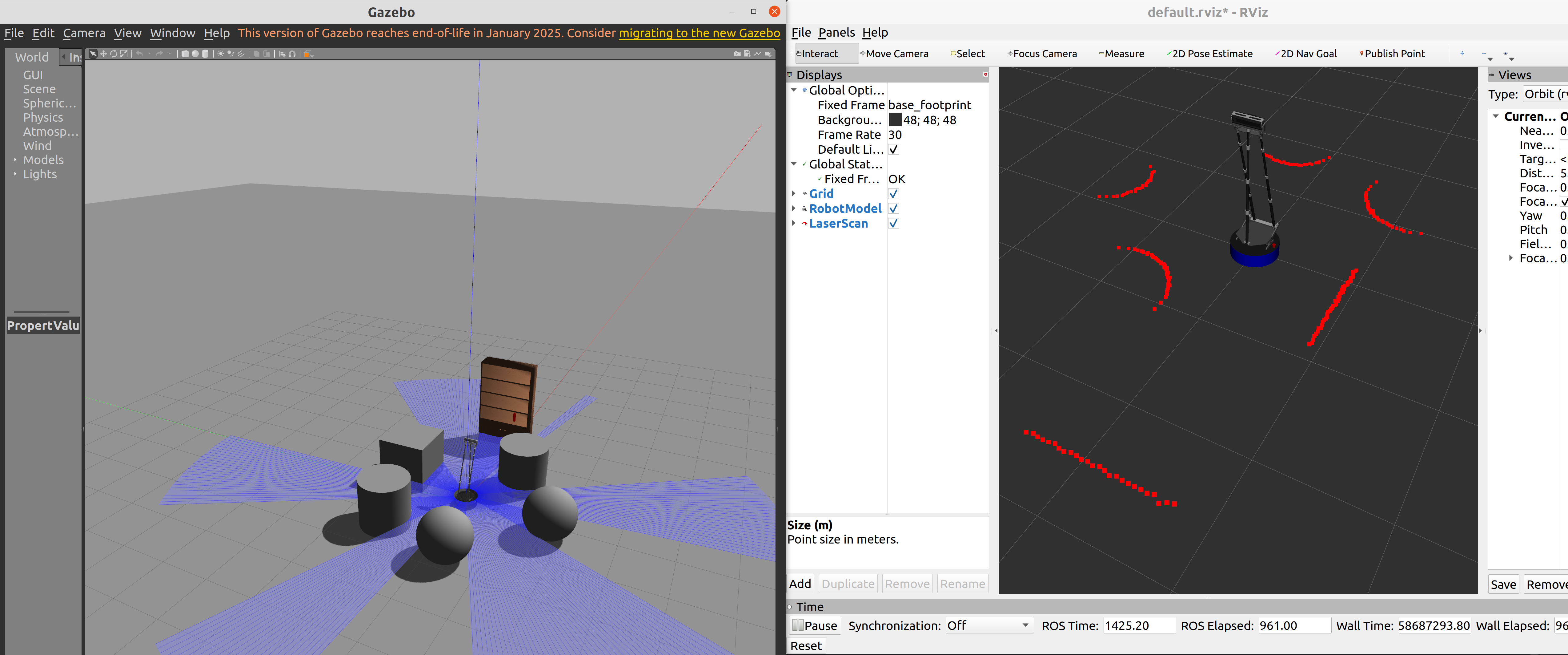
修改左边界面显示,左下角add RobotModel和LaserScan,如图(如果没有机器人模型的话就source一下再打开rviz)
 ****
****
这一排红色点阵就是雷达获取的数据,可以在仿真环境中添加障碍物来查看rviz的显示
可以导出此次的配置文件,然后下次打开rviz后再open配置文件。点击左上角的flies目录就可以看到
Tips
- rviz只是一个数据可视化界面,用于显示机器人获取的数据,无论他是仿真机器人还是真实的机器人
- 可以通过launch文件来自动配置rviz的参数
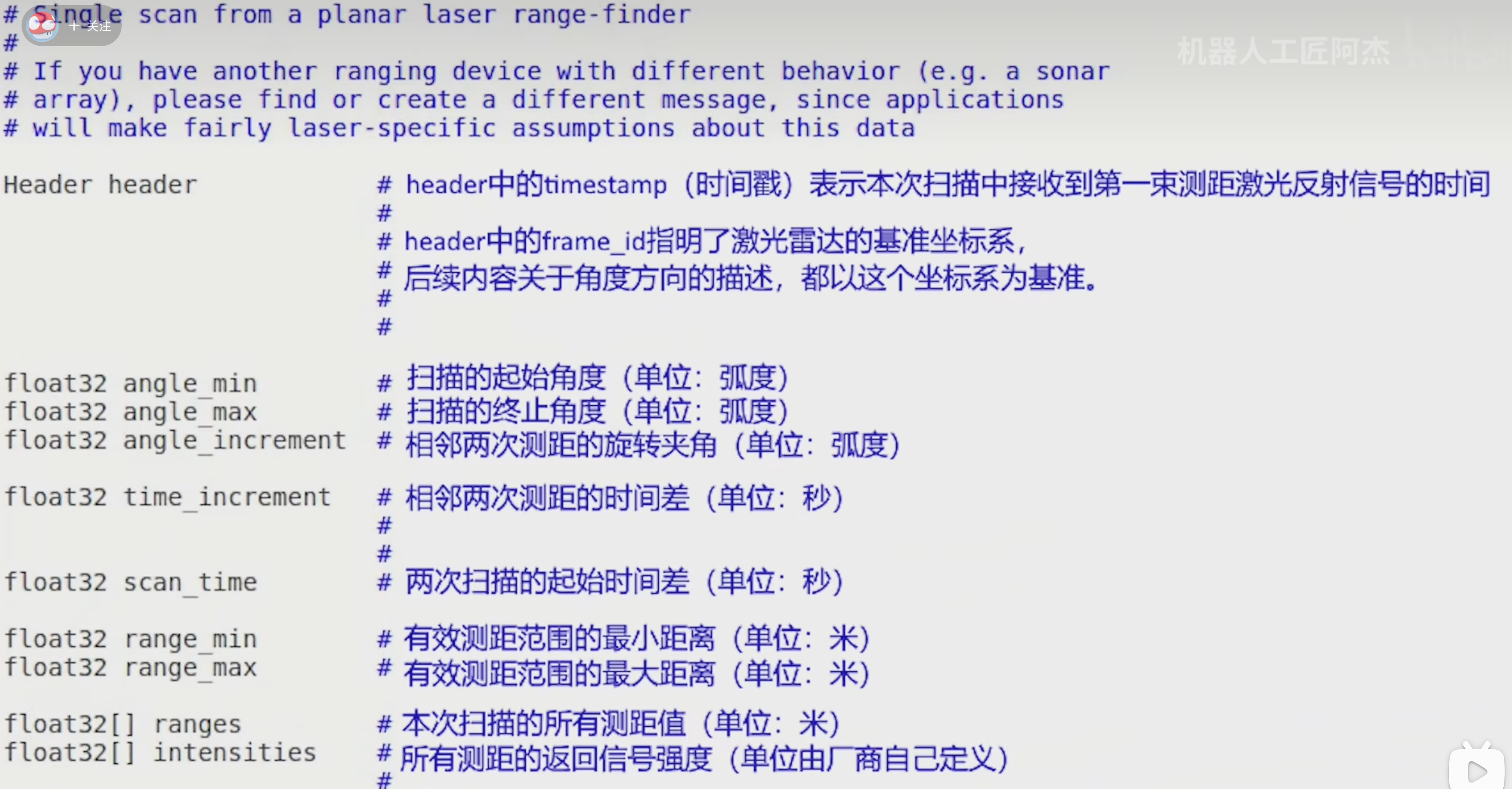
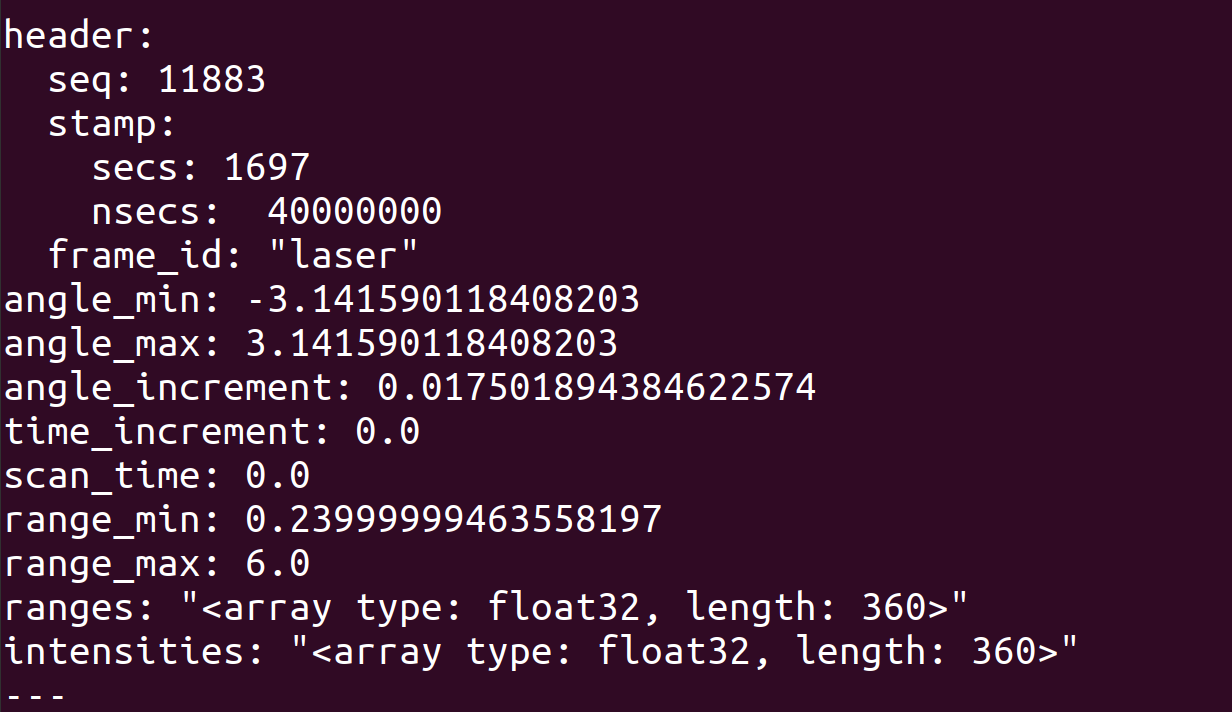
Ros中激光雷达的消息包格式
在roswiki官网中可以打开sensor_msgs/LaserScan Message,注释翻译成中文
可以在终端中显示消息类型
输入rostopic echo /scan –noarr
用c++实现获取激光雷达
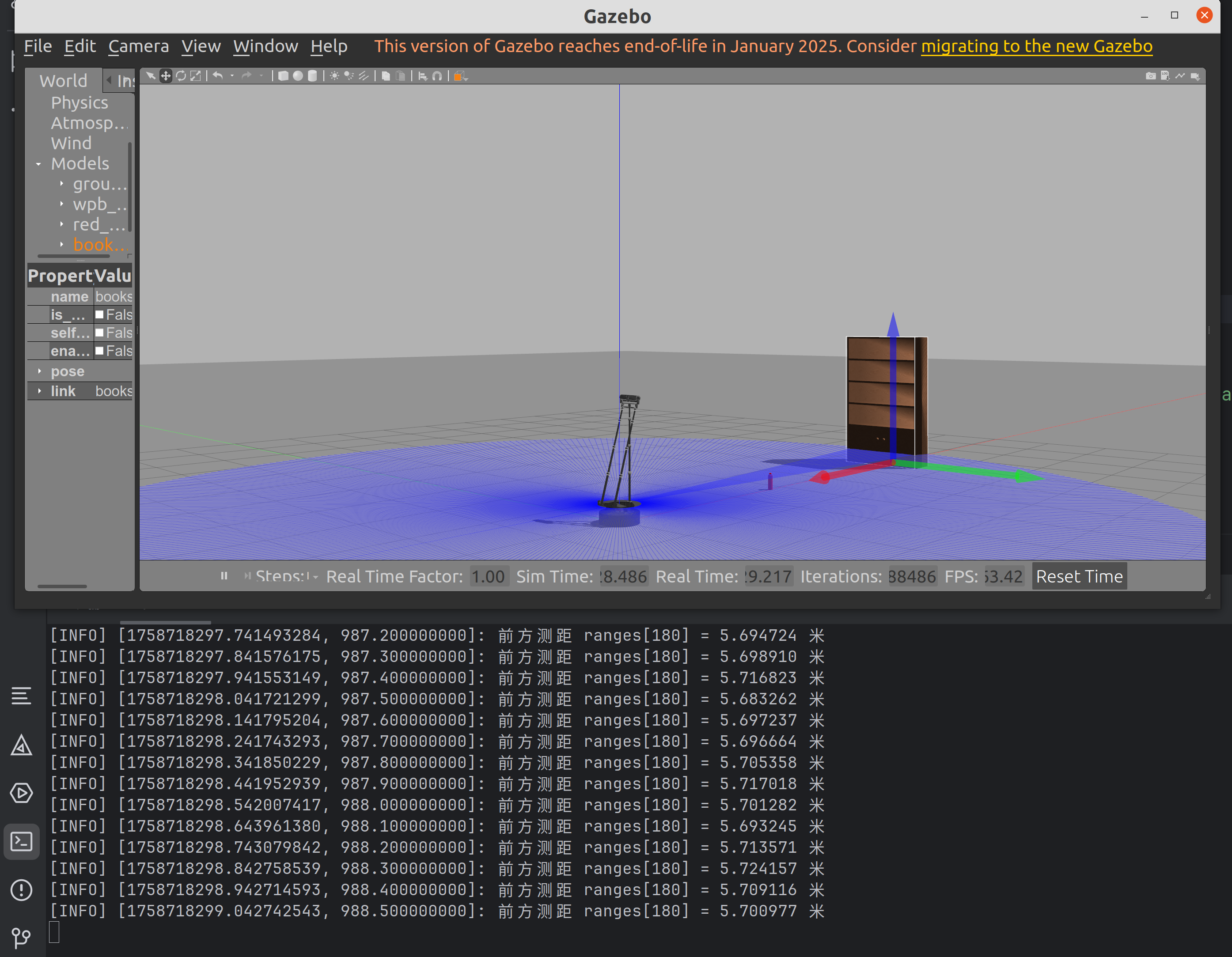
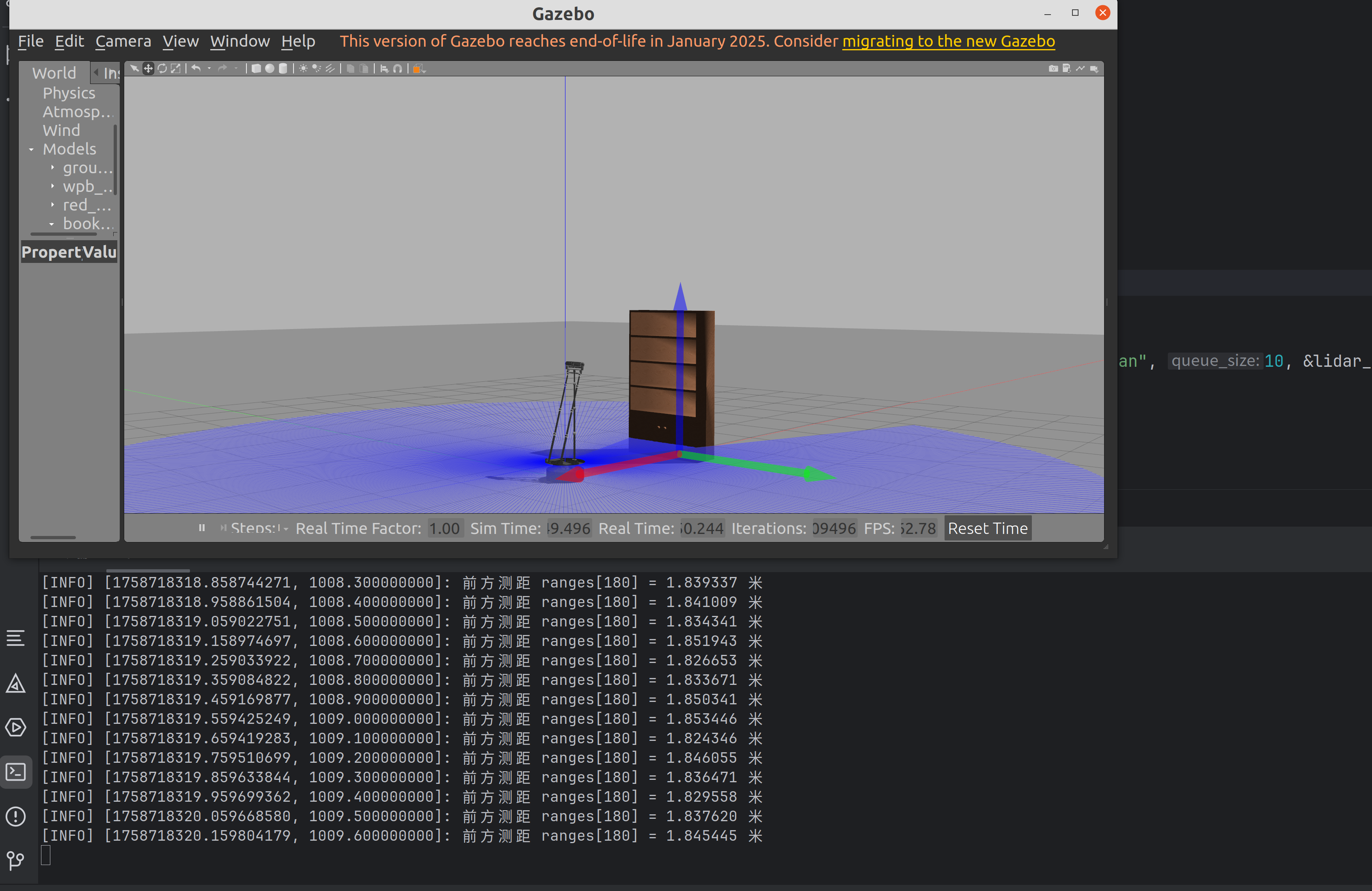
构建一个新的软件包,包名为lidar_pkg
新建一个节点,lidar_node
在节点中,向ros大管家nodehandle申请订阅话题,并设置回调函数为lidarcallback()
构建回调函数,接受并处理数据
调用ros_info()显示雷达检测到的前方障碍物距离
函数如下:
1 | void lidar_Callback(const sensor_msgs::LaserScan msg) { |
编译运行后,再打开仿真工具,移动前方的书架,可以看到距离的变化
实现简单的避障控制
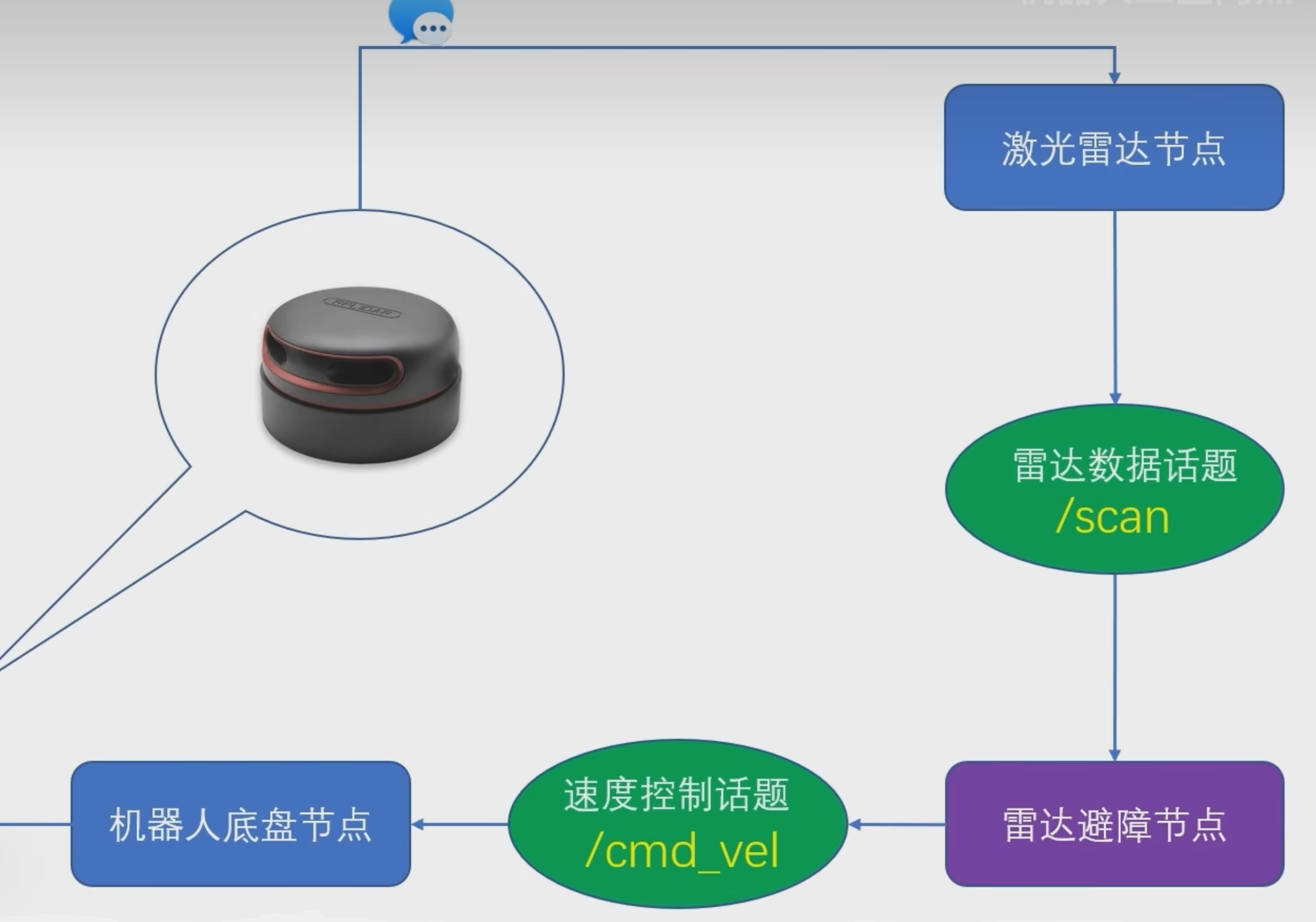
在上一节的基础上修改程序就可以了
- 发布速度控制话题/cmd_vel
- 构建速度控制消息包,vel_cmd用于数据传输
- 根据激光雷达的测距值,调整机器人运动速度,避开障碍
1 | ros::Publisher vel_pub ; |
Ros中IMU的使用
Imu Message
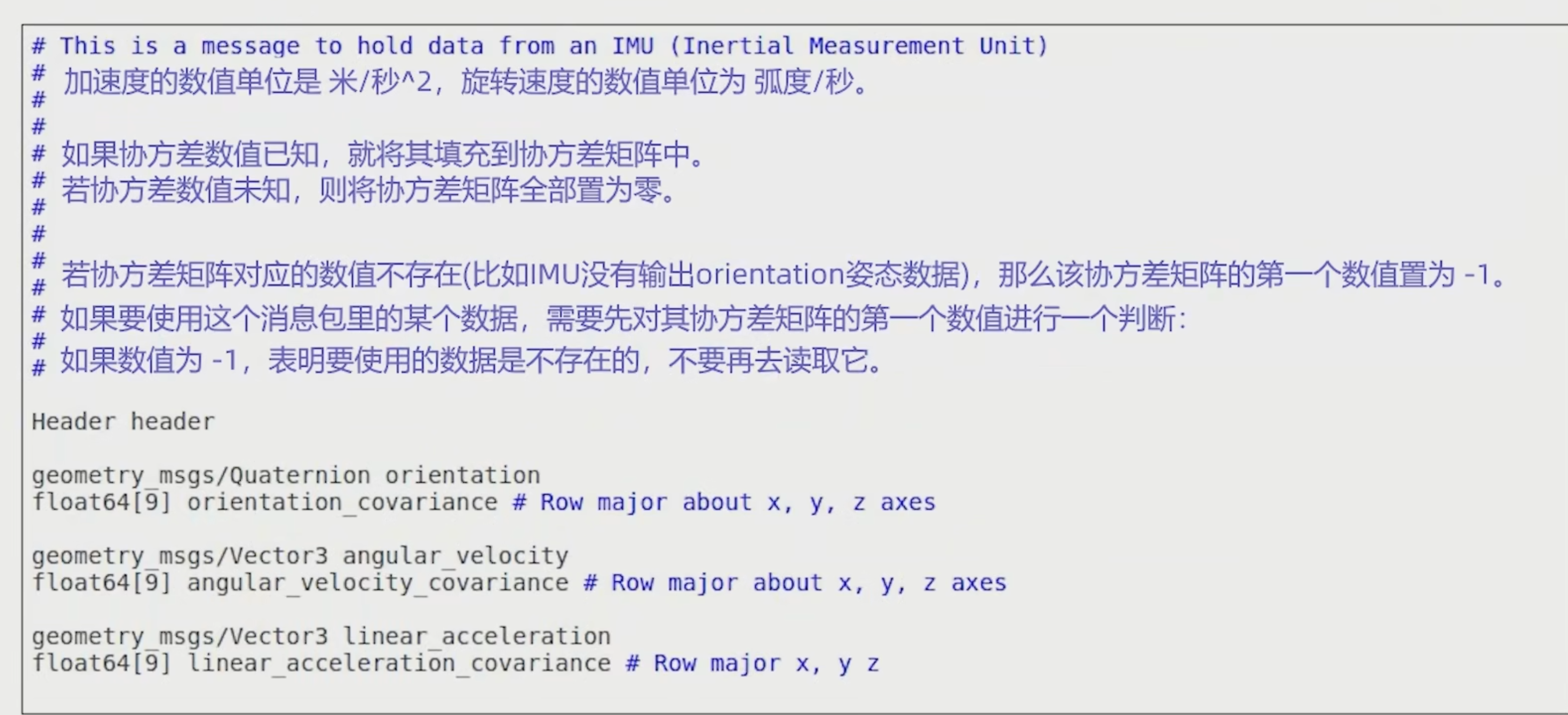
- angular_veloity ——————x,y,z三轴的旋转速度
- liner——acceleration——————xyz三轴矢量加速度
- orientation——————xyz经处理后的偏移量,数据类型是Quaternion,包含float x,y ,z ,w。四元数描述。
C++实现imu数据获取
Ros官方给出了三个话题
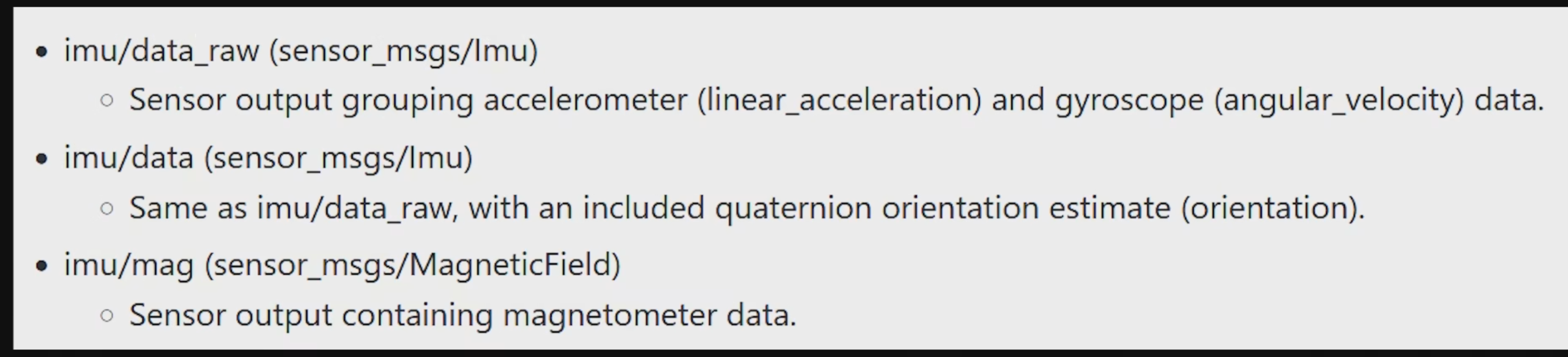
六轴原始数据
六轴原始数据和融合后的四元数姿态描述
加上磁力计的九轴数据
Cpp实现步骤:
创建一个新的pkg
建立节点,imu_node
编程构建imu_node,利用回调函数对imu的数据进行处理
使用tf工具转换数据,并屏幕打印
1 | void IMUCallback(const sensor_msgs::Imu msg) |
实现与运动控制的结合
1 | ros::Publisher vel_pub ; |
栅格地图
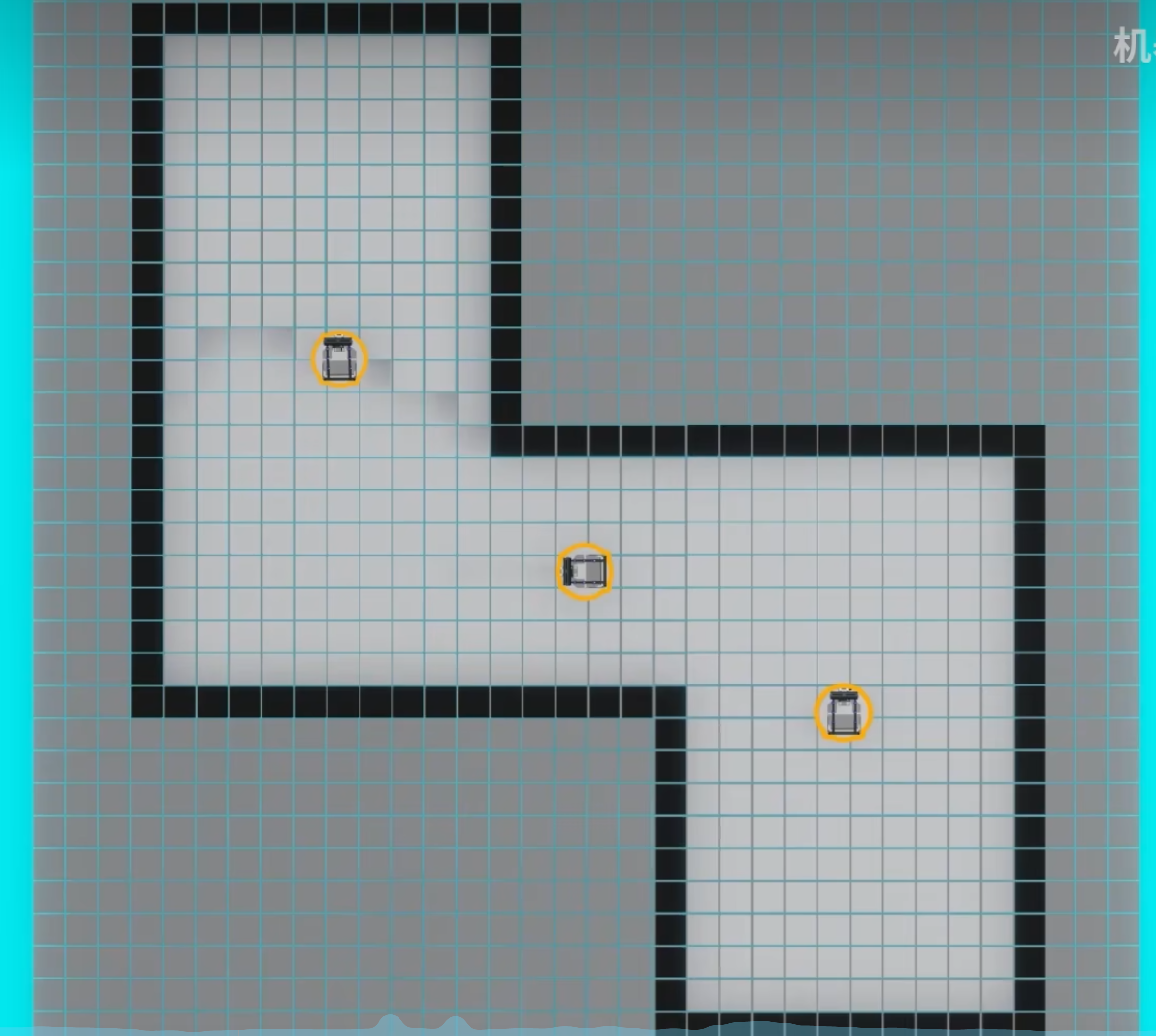
假设地图上有两个障碍物,以俯视观察他。将地图用大小相同的方格代替,被占据的格子(哪怕只占据一点)涂上黑色,未被占据的栅格涂上白色。如图
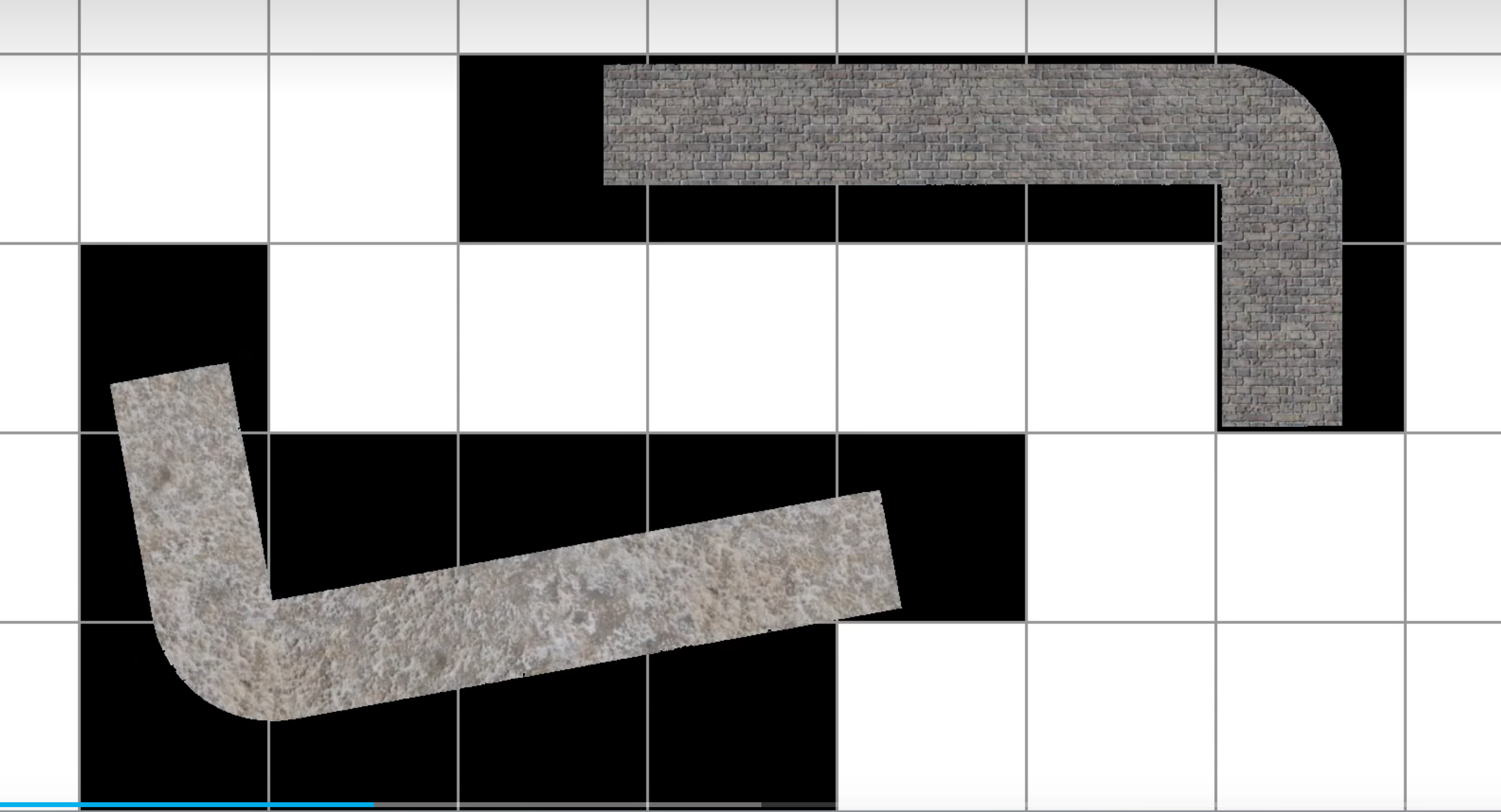
切换栅格的大小可以让障碍物的表示更加精准,理论上可以无限逼近实际的大小。
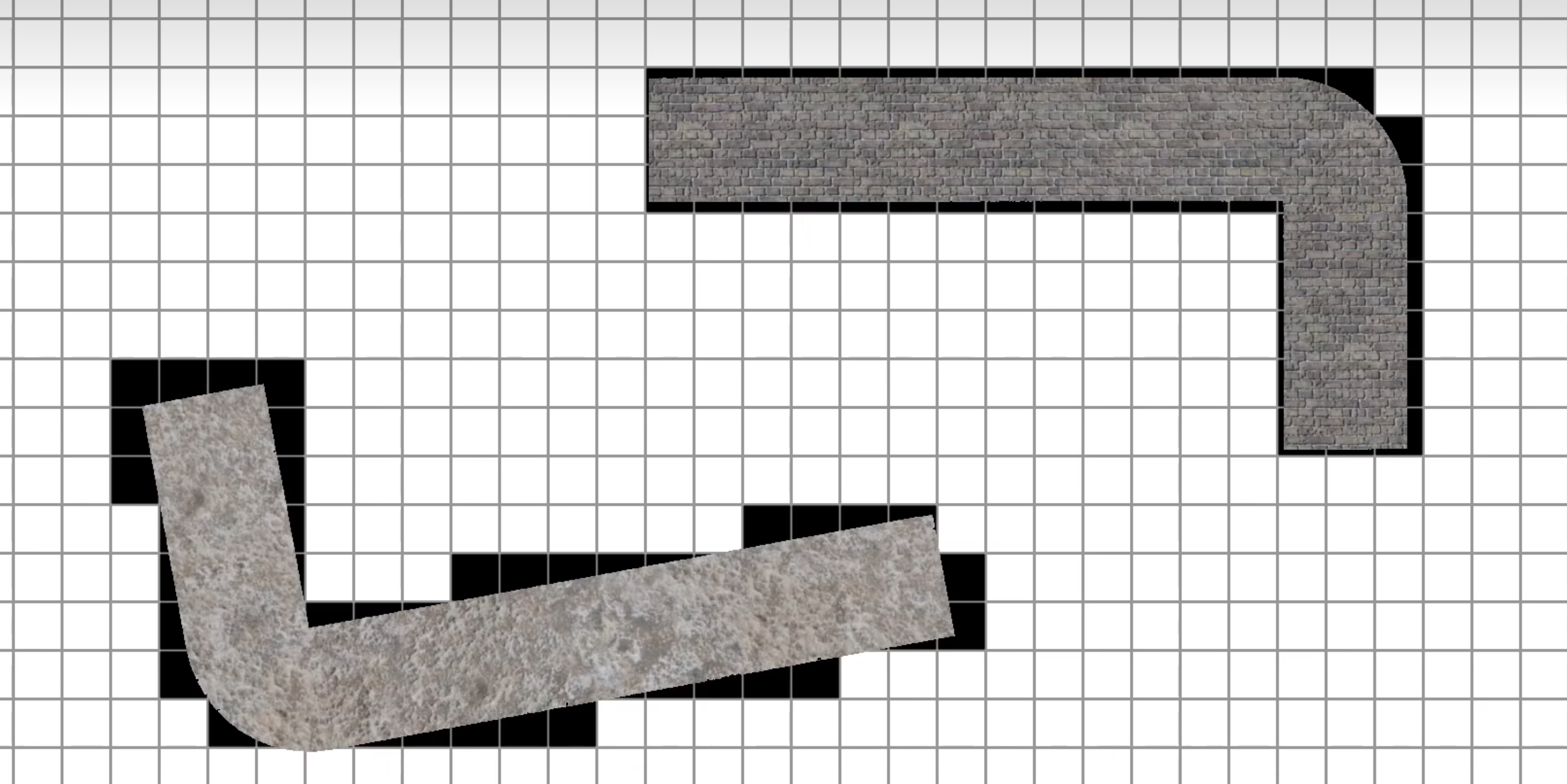
- 一个小正方形的边长(栅格边长)即为地图分辨率。
- 将黑色格子标记为1,空白格子为0,这样整个地图就可以以数组的形式存储数据来表示。
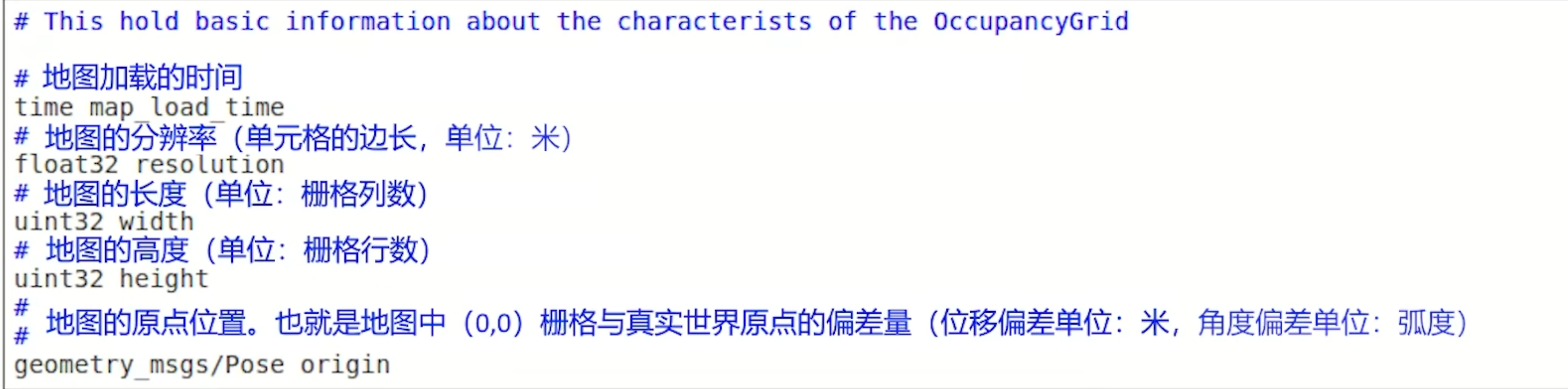
Ros栅格地图消息的数据结构
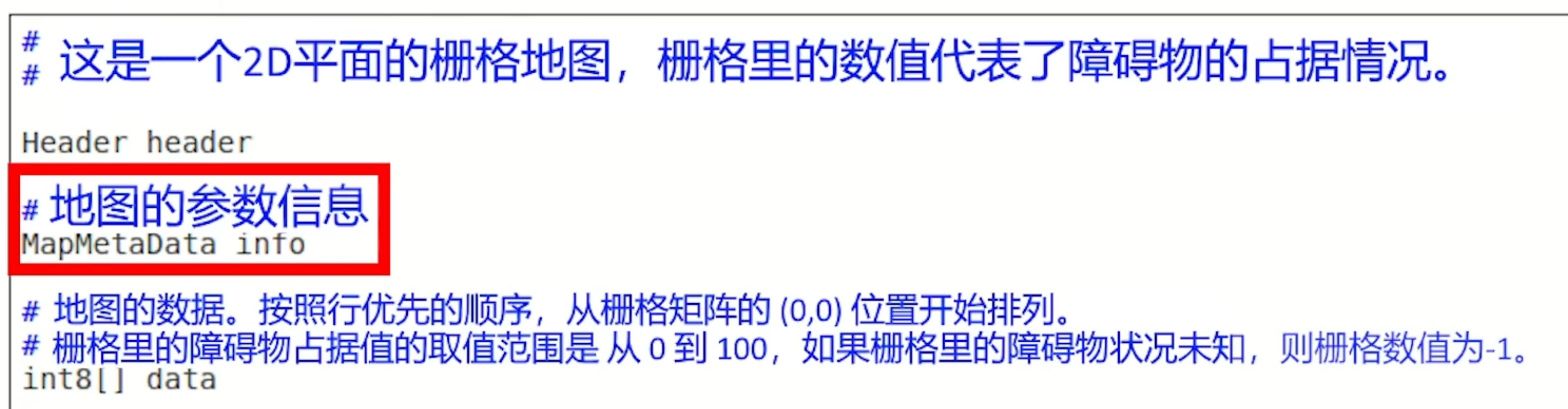
info的包含如下:
C++编写节点
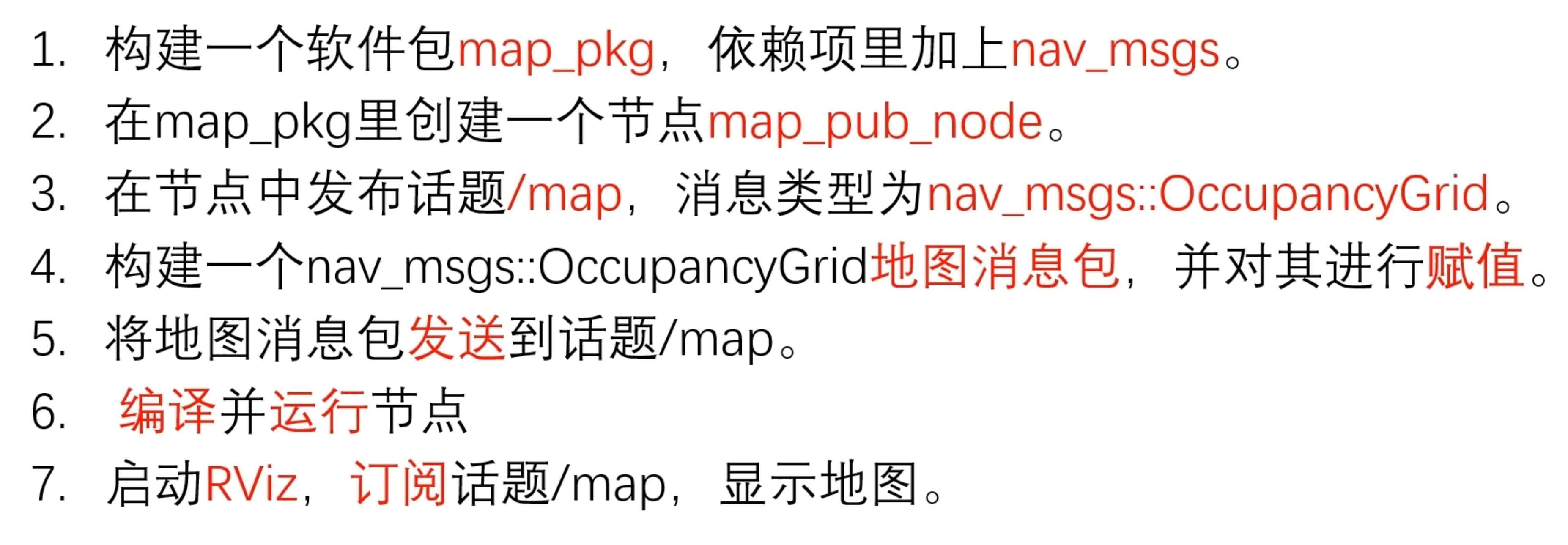
1 | int main(int argc, char **argv) { |
启动roscore,启动节点,启动rviz
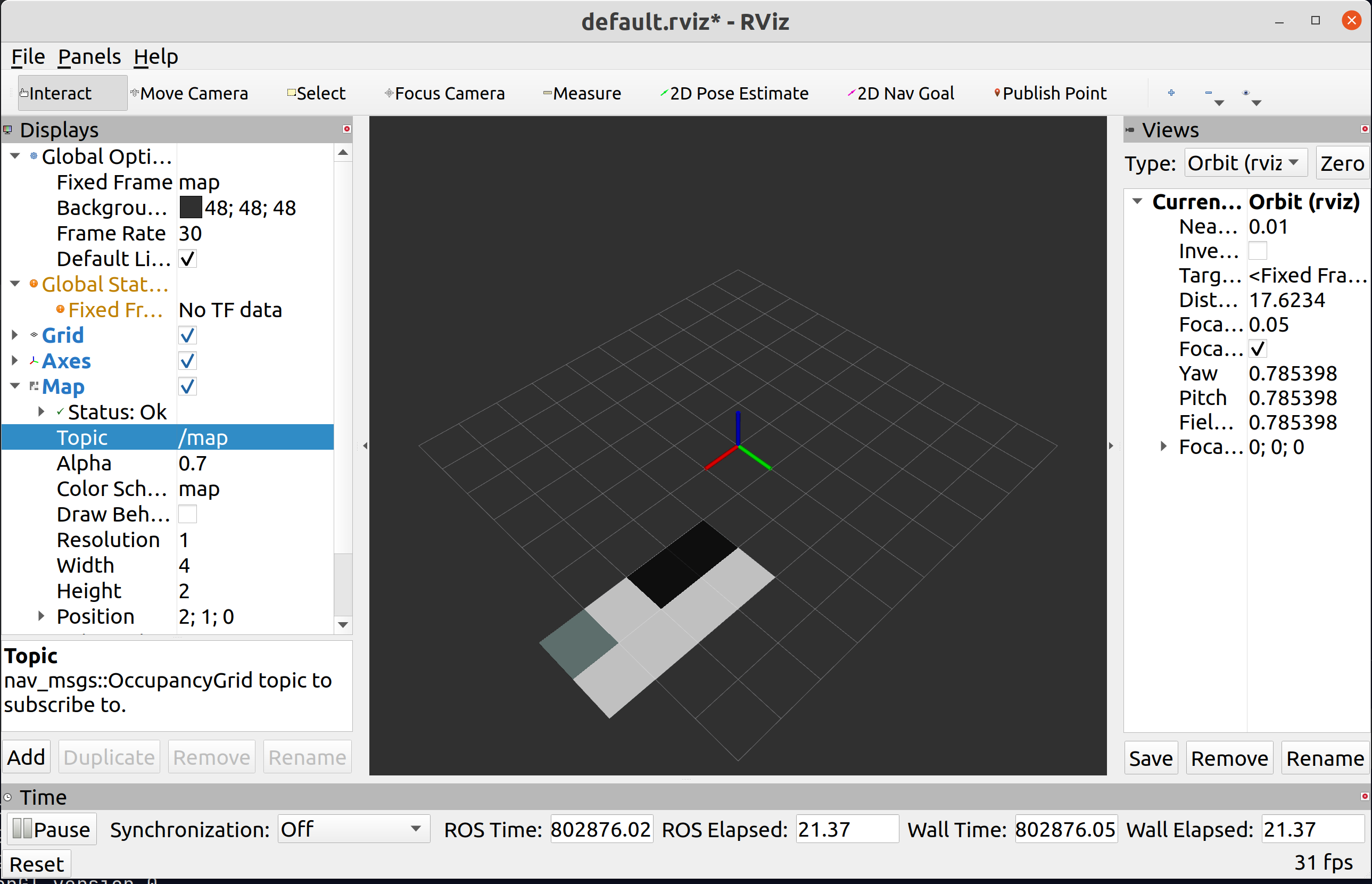
添加起始点(Axes)和Map,topic选择写好的/map话题。可以看到地图按照我们定义的样子展现出来。
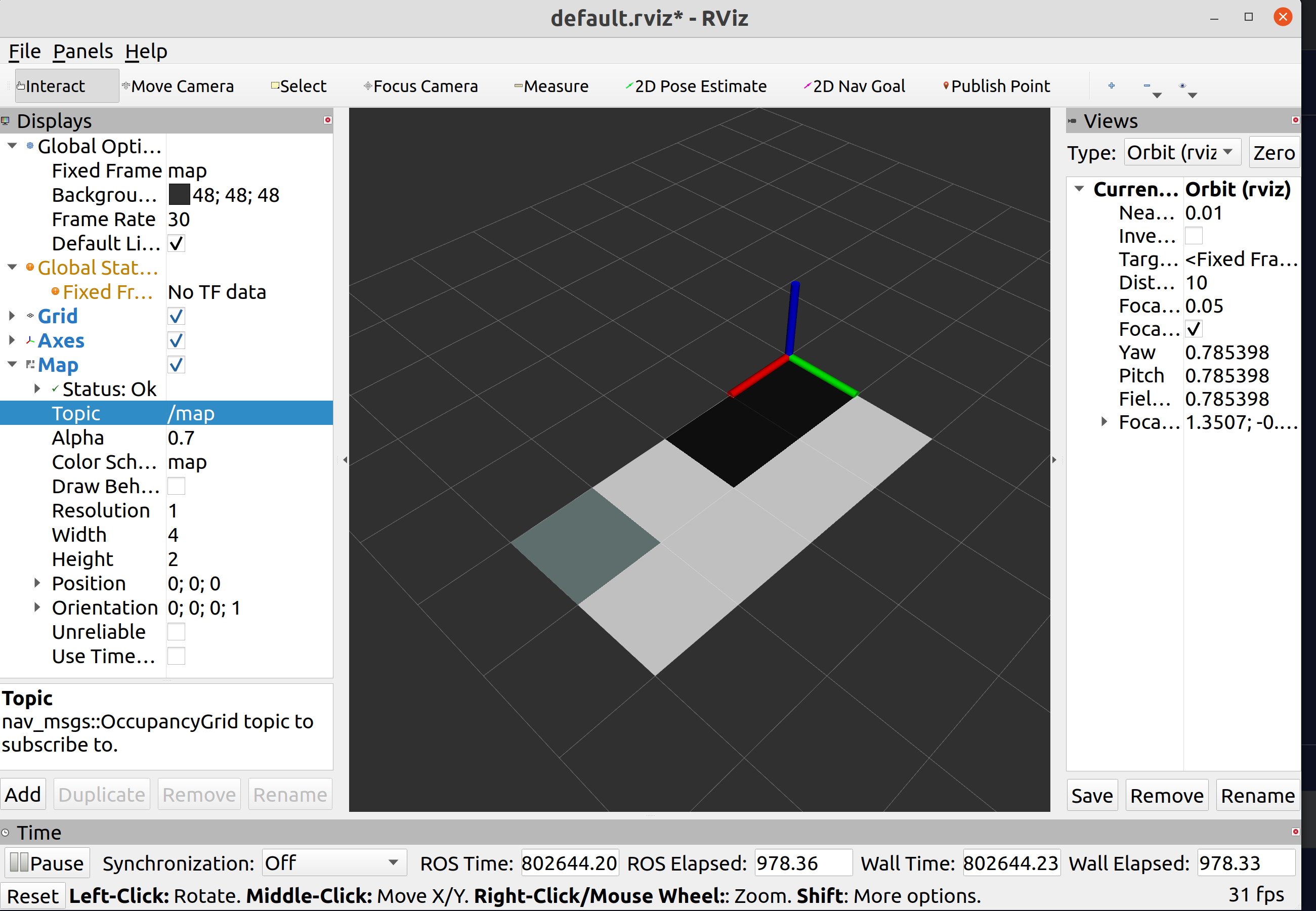
1 | msg.info.origin.position.x = 2.0; |
如果更改了上面的数值,他们不再为0,就会出现这样子的情况:
SLAM
全程是simultaneous localization and mapping,同时定位与地图创建。
定位:是指机器人确定自己的位置。
Slam的原理
如何创建地图呢??
先选定一个原点作为参照系,建立坐标轴,通过记录当前观测点与对应参照物的坐标,改变不同观测点,将多次记录的坐标进行比对,将参照物重合构建出一张完整的地图。
在Ros中如何实现建图的功能呢
首先,Ros是地图是栅格地图,机器人放置在环境中,没有开启传感器感知周围时,所有格子的值均为-1,涂上灰色。
假设此时机器人开启了雷达扫描功能,激光发射出去穿过的格子都标记为0,涂上白色,代表没有障碍物。直到激光撞到障碍物,反射回来,这个格子标记为100,涂上黑色。这样子就能得到当前观测点的周围障碍物情况,改变观测点后,又进行一次扫描,标记出周围的情况。将两次的标记情况进行特征重合,构建出局部的地图。不断重复这个过程,就可以得到一副完整的地图了。
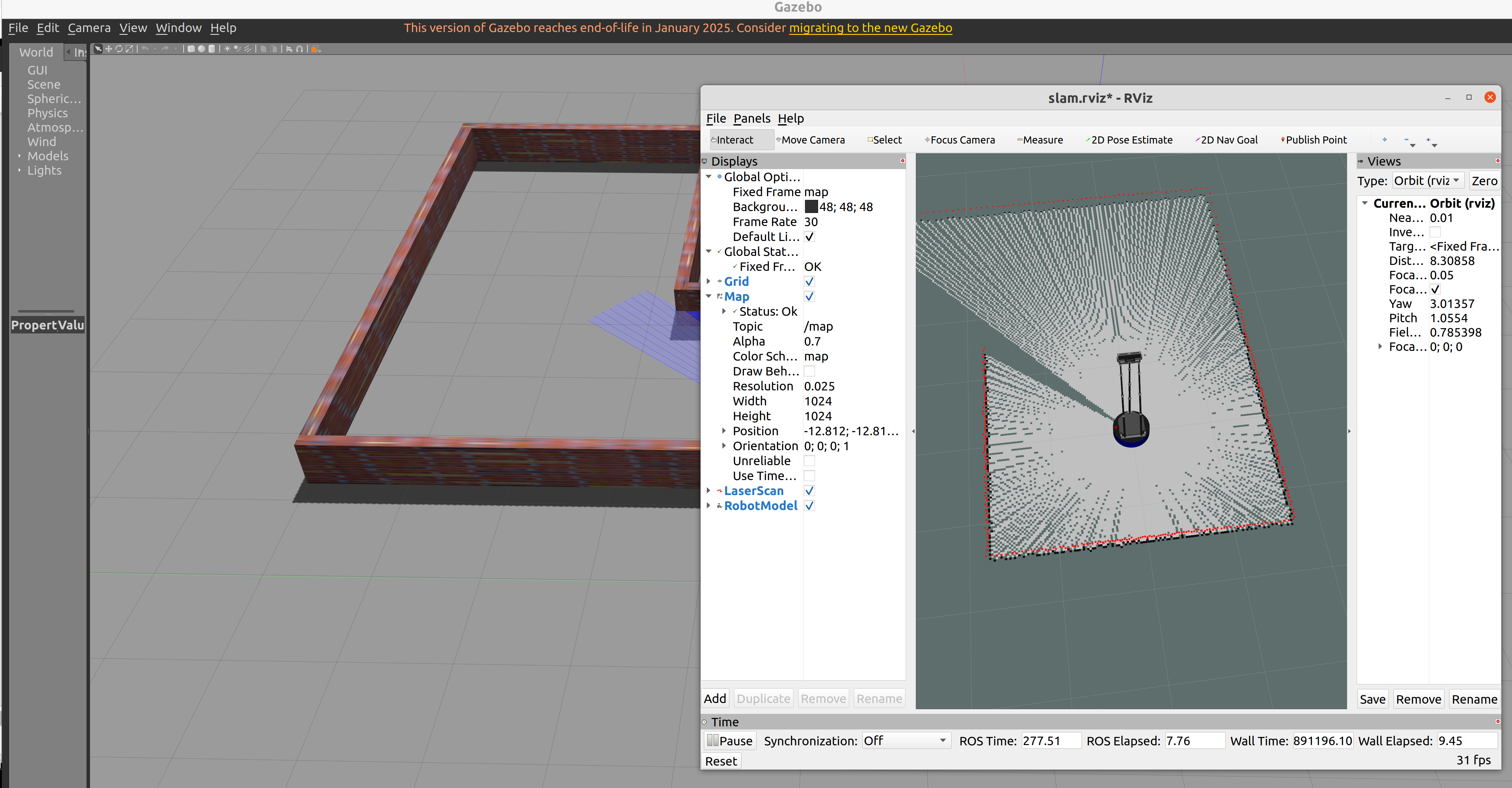
Ros中通过c++实现Slam
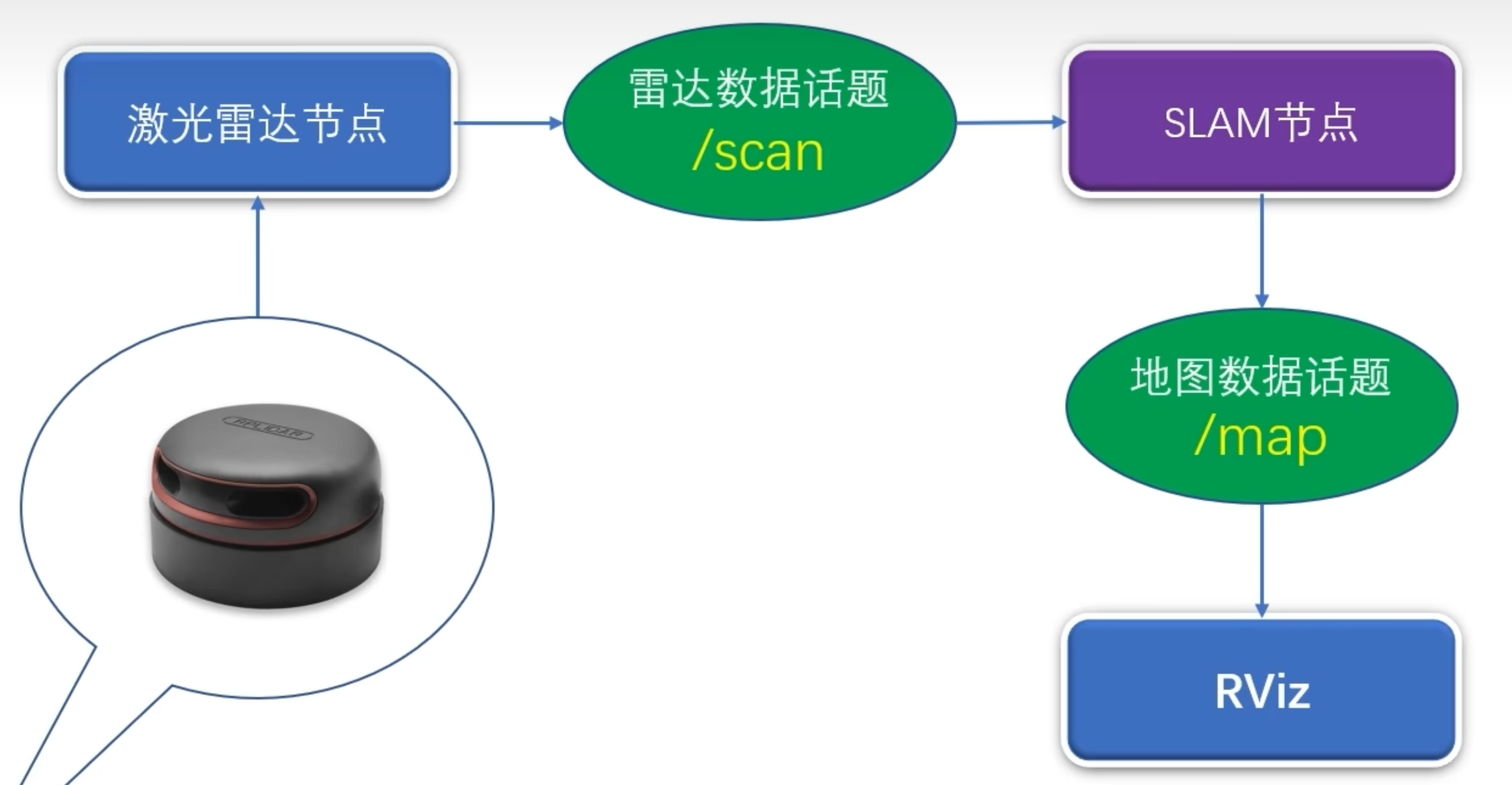
激光雷达发送数据到slam节点进行处理(建图算法),在发布map话题让rviz可视化界面订阅,就可以显示地图出来了。
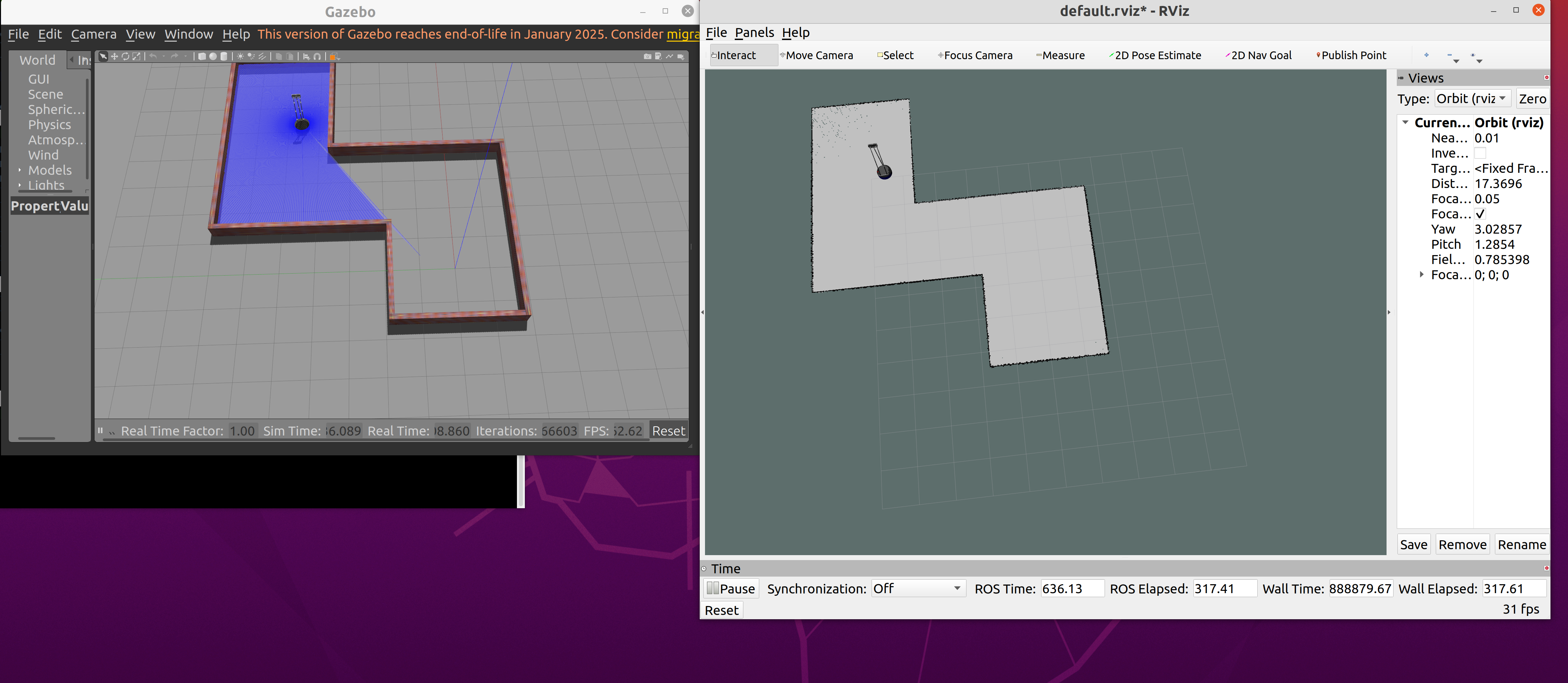
Slam算法节点在ros中有提供,叫做Hector_Mapping节点。不用重复造轮子。
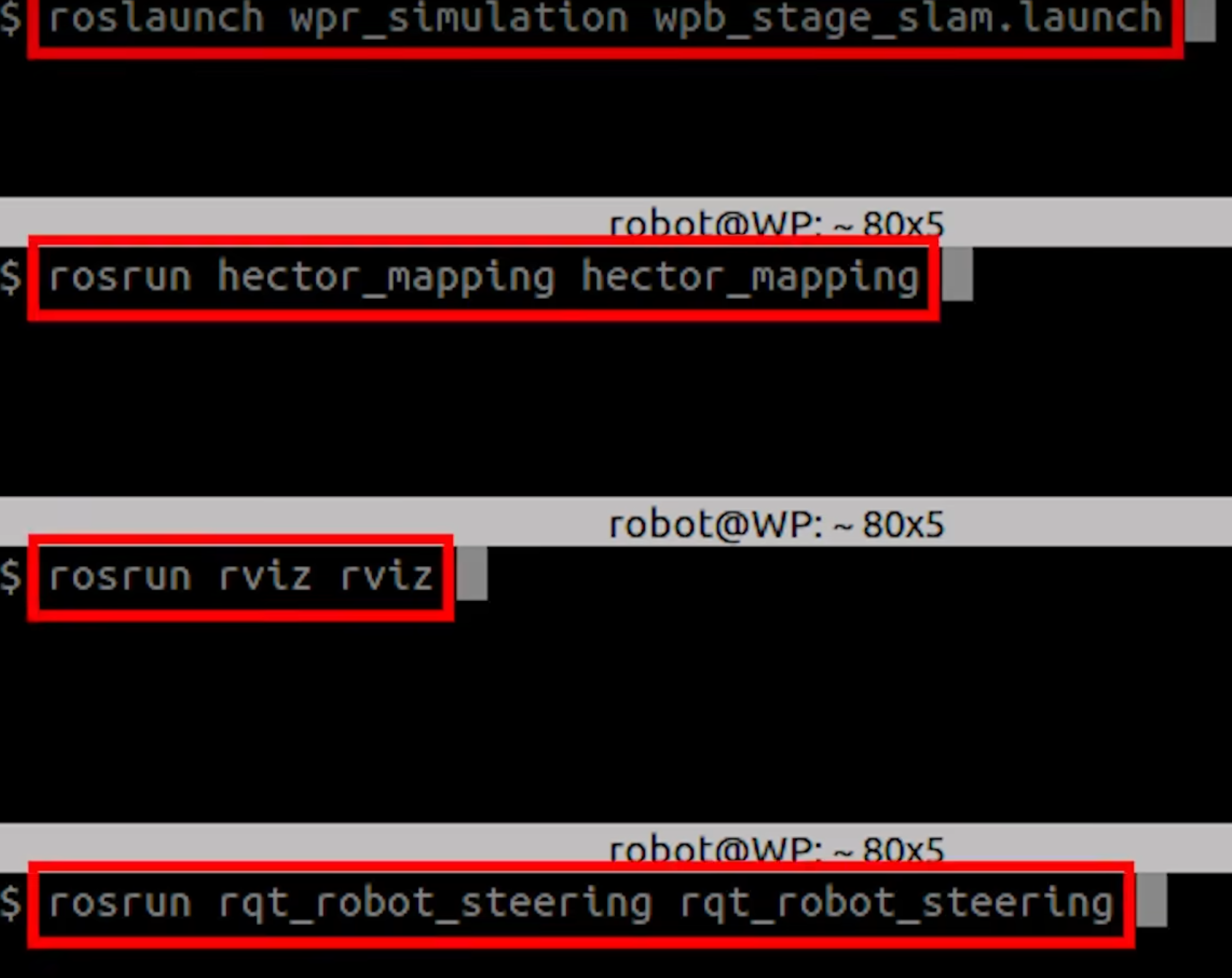
通过运行前三条指令可以开启slam的扫描功能,在rviz界面中add选项添加机器人model和map地图
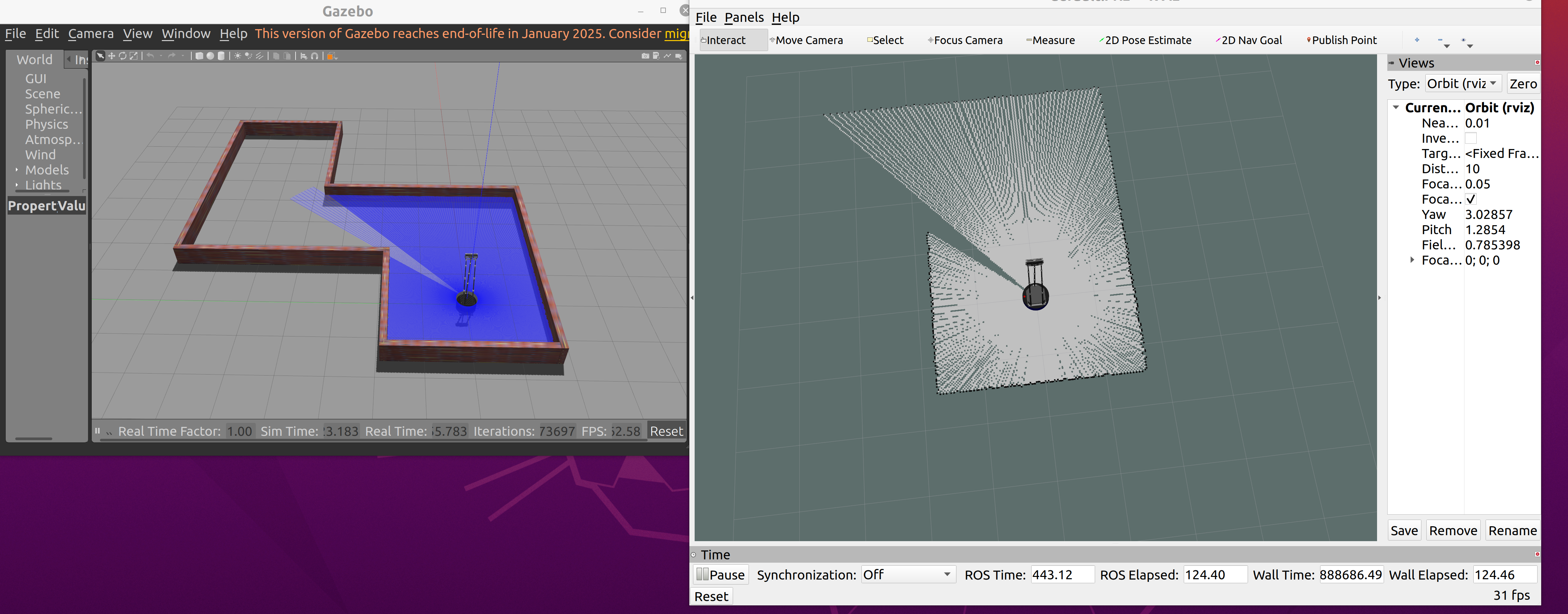
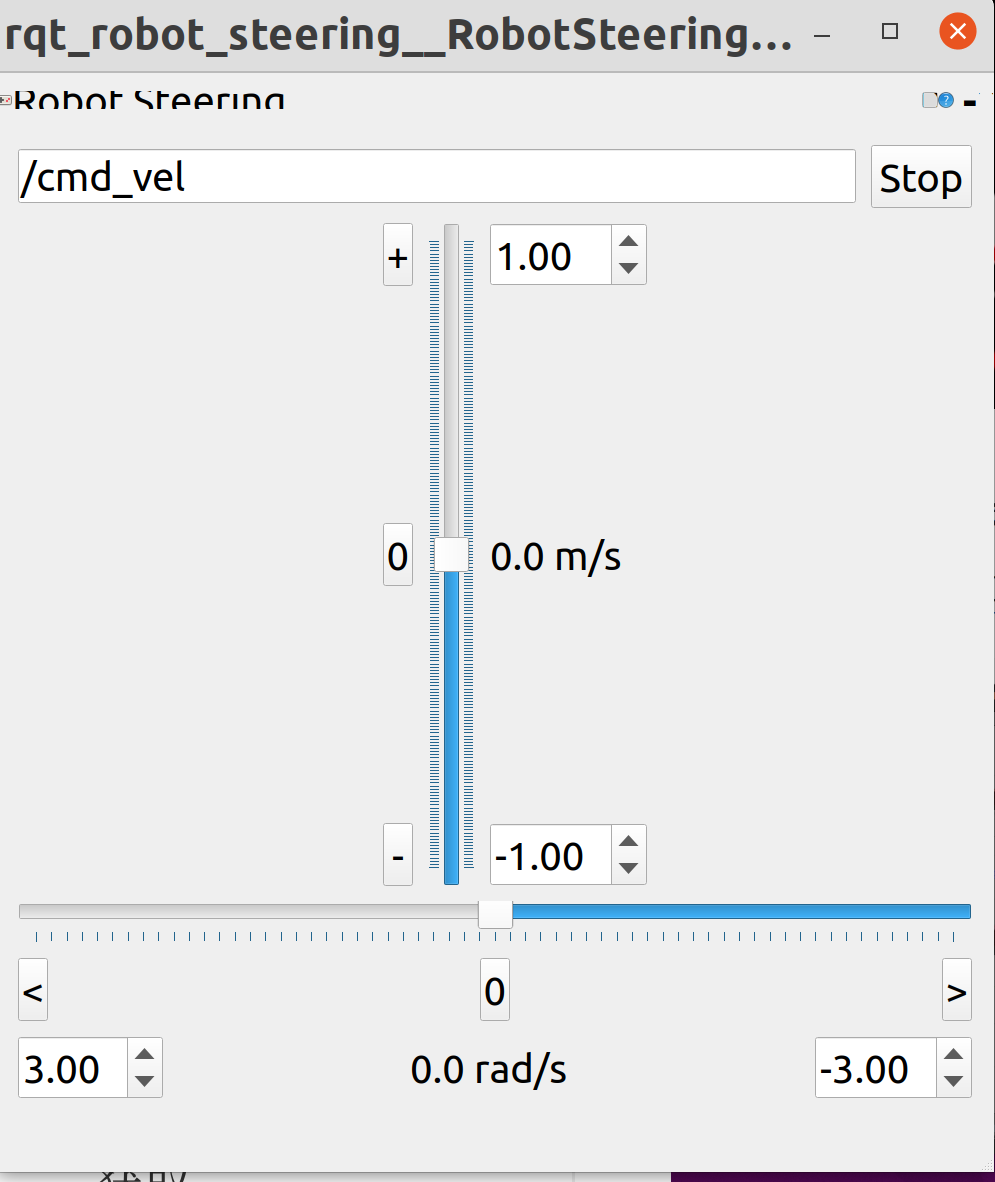
第四行指令可以开启一个图像化界面来控制机器人运动
控制机器人移动,建模成功。
launch文件使用
操作这么多有点麻烦,现在编写一个launch文件来一次性开启这些程序。
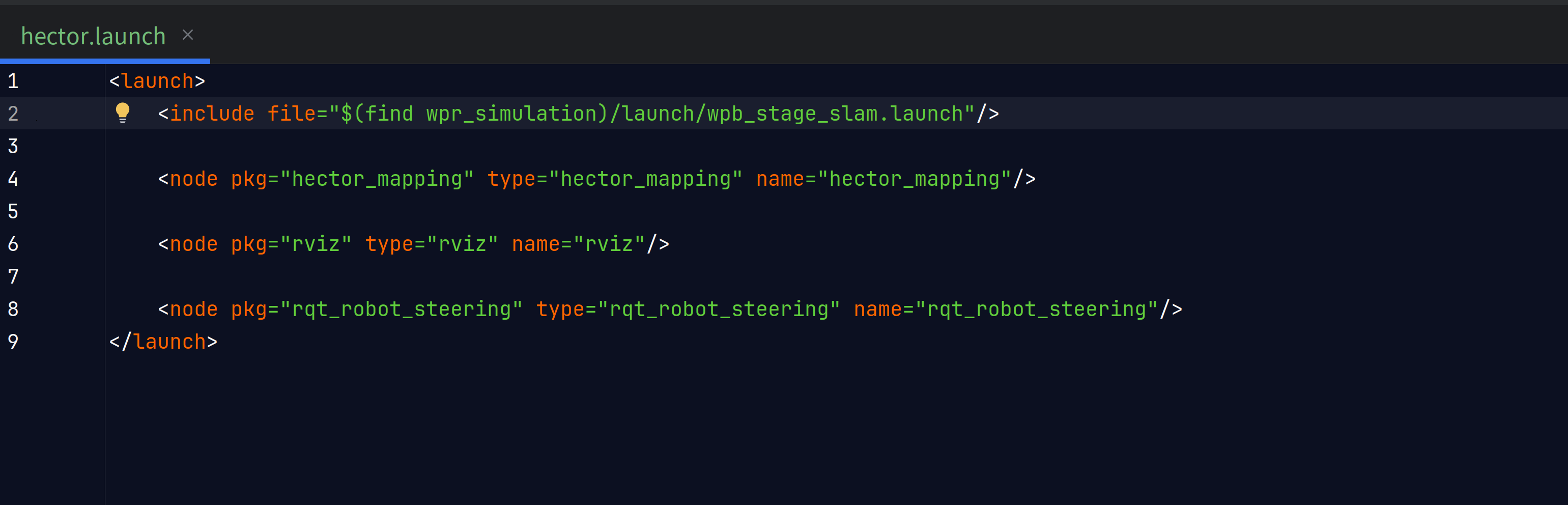
第一条语法是包含另一个launch文件的写法,¥()用于查找括号下软件包的目录,后面接着具体文件路径。
其余三条,之前已经说明过。
编译运行。成功。
在rviz中导出配置好的rviz,放入pkg文件夹里的rviz目录下,并命名slam.rviz。
1 | rviz -d ~/Ros_WorkSpace/src/slam_pkg/rviz/slam.rviz |
可以在终端输入这段代码打开rviz后自动加载配置文件,也可以打开rviz后再手动选择加载。
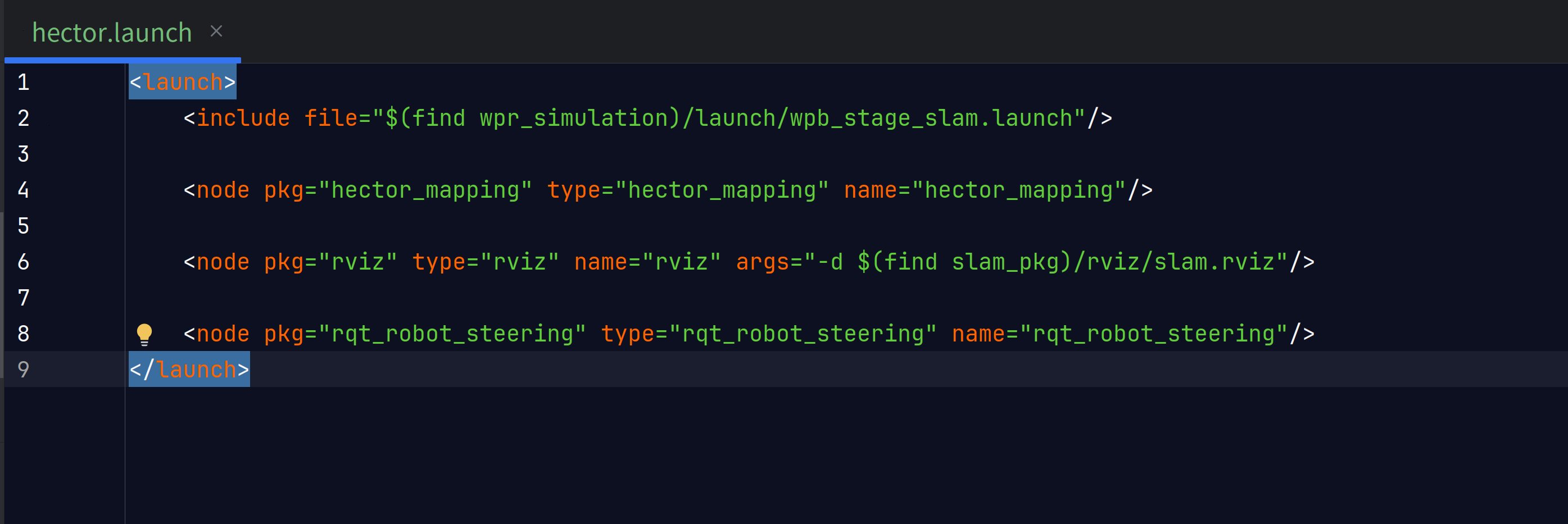
可以在launch中添加参数args ,通过rviz来自动加载rviz的配置。
这样子就算自动配置好launch文件了。


